Блог:Точка Росы №10 — печатный вариант — различия между версиями
м (Stanislav.fomin moved page Blog:Точка Росы/Точка Росы №10 — печатный вариант to Blog:Точка Росы №10 — печатный вариант) |
|||
| Строка 4: | Строка 4: | ||
или через социальные сети — [http://vk.com/rosalab VK], [https://www.facebook.com/ROSALaboratory/ FB], недавно заведенная [https://plus.google.com/u/0/b/118137120733890277342/118137120733890277342/posts официальная страница компании в G+] и давно самозародившееся [https://plus.google.com/communities/117863103616577599005 неофициальное сообщество в G+]. | или через социальные сети — [http://vk.com/rosalab VK], [https://www.facebook.com/ROSALaboratory/ FB], недавно заведенная [https://plus.google.com/u/0/b/118137120733890277342/118137120733890277342/posts официальная страница компании в G+] и давно самозародившееся [https://plus.google.com/communities/117863103616577599005 неофициальное сообщество в G+]. | ||
| − | А дайджесты и PDF-сборки статей интересны наверное тем, кто не сильно заинтересован в нашей работе, но изредка готов, без лишних переходов по гиперссылкам, возможно даже от отчаяния ( | + | А дайджесты и PDF-сборки статей интересны, наверное, тем, кто не сильно заинтересован в нашей работе, но изредка готов, без лишних переходов по гиперссылкам, возможно, даже от отчаяния (Интернета нет, но есть недочитанный PDF-файл), полистать его, чтобы ознакомится с нашей работой. |
| − | Исторически, именно PDF-файлами мы начинали публиковать «Точку Росы» на | + | Исторически, именно PDF-файлами мы начинали публиковать «Точку Росы» на Опеннете и ЛОРе, но с публикацией там всегда есть проблема: почему-то начинается обсуждение, касающееся чего угодно — обложки, личного мнения о сотрудниках и нашей работе, о политике… обо всем, кроме, собственно, содержания. |
| − | Поэтому мы там точно не очень хотим появляться часто, чтобы не надоедать | + | Поэтому мы там точно не очень хотим появляться часто, чтобы не надоедать и не раздражать собравшуюся публику. |
Итак, в десятом выпуске «Точки РОСЫ»: | Итак, в десятом выпуске «Точки РОСЫ»: | ||
| Строка 23: | Строка 23: | ||
| − | ;Инсталляция и загрузка, системы и программ: Самый ключевой процесс, мы стараемся сделать так, чтобы поставить систему можно было в любой ситуации | + | ;Инсталляция и загрузка, системы и программ: Самый ключевой процесс, мы стараемся сделать так, чтобы поставить систему можно было в любой ситуации и она надежно грузилась. Стараемся улучшить и процесс установки новых программ, который, по привычке, многие пользователи также называют «инсталляцией» или «загрузкой». |
* {{rosapoint-include|Установка 32-битной версии ROSA в UEFI}} | * {{rosapoint-include|Установка 32-битной версии ROSA в UEFI}} | ||
* {{rosapoint-include|Установка ROSA в UEFI-режиме при наличии Windows в Legacy-BIOS-режиме}} | * {{rosapoint-include|Установка ROSA в UEFI-режиме при наличии Windows в Legacy-BIOS-режиме}} | ||
| Строка 40: | Строка 40: | ||
| − | ;Фичи и багфиксы: наши наработки и доработки | + | ;Фичи и багфиксы: наши наработки и доработки рабочих столов и отдельных утилит, GNOME и KDE, все для юзабилити и надежности. |
* {{rosapoint-include|Откапываем забытый Tray — панель уведомлений снова видна в режиме обзора}} | * {{rosapoint-include|Откапываем забытый Tray — панель уведомлений снова видна в режиме обзора}} | ||
* {{rosapoint-include|PDF-браузинг у нас в GNOME ОК}} | * {{rosapoint-include|PDF-браузинг у нас в GNOME ОК}} | ||
| Строка 48: | Строка 48: | ||
* {{rosapoint-include|WBEM — открываем возможности локализации}} | * {{rosapoint-include|WBEM — открываем возможности локализации}} | ||
| − | ;Опросы: Мы постоянно | + | ;Опросы: Мы постоянно получаем обратную связь — однако в форумы и группы техподдержки обращаются в основном с жалобами, и сейчас, в век информационной перегрузки, уже сложно ждать классических «писем в редакцию», поэтому мы стараемся делать короткие опросы, на которые можно ответить парой кликов за секунду. |
* {{rosapoint-include|Какие рабочие столы вы используете в дистрибутивах ROSA? Опрос…}} | * {{rosapoint-include|Какие рабочие столы вы используете в дистрибутивах ROSA? Опрос…}} | ||
* {{rosapoint-include|Как вам наши темы для GNOME? Видеоопрос}} | * {{rosapoint-include|Как вам наши темы для GNOME? Видеоопрос}} | ||
| Строка 71: | Строка 71: | ||
== Конференции, мероприятия и прочая движуха == | == Конференции, мероприятия и прочая движуха == | ||
| − | Ну и для всех более-менее связанных с IT | + | Ну и для всех более-менее связанных с IT будут интересны наши обзоры и видеозаписи IT-конференций. |
Кстати, в [http://talks.rosalab.com нашей медиатеке] уже девять сотен докладов. Заходите, смотрите, комментируйте. | Кстати, в [http://talks.rosalab.com нашей медиатеке] уже девять сотен докладов. Заходите, смотрите, комментируйте. | ||
Версия 11:10, 21 апреля 2015
Пришло время для очередного дайджеста «Точки РОСЫ», ведь с момента предыдущего прошел уже год.
Да, в в прошлом выпуске мы спрашивали, с какой периодичностью выпускать наш журнал-дайджест, и там лидировали варианты «еженедельно» и «ежемесячно». Но, понятное дело, это неразумно — ведь за неделю у нас может и вовсе не быть ни одной новости, хотя может и несколько — ну для этого у нас есть и [[..|этот блог]], на который можно подписаться и классически — по RSS/Atom, или через социальные сети — VK, FB, недавно заведенная официальная страница компании в G+ и давно самозародившееся неофициальное сообщество в G+.
А дайджесты и PDF-сборки статей интересны, наверное, тем, кто не сильно заинтересован в нашей работе, но изредка готов, без лишних переходов по гиперссылкам, возможно, даже от отчаяния (Интернета нет, но есть недочитанный PDF-файл), полистать его, чтобы ознакомится с нашей работой.
Исторически, именно PDF-файлами мы начинали публиковать «Точку Росы» на Опеннете и ЛОРе, но с публикацией там всегда есть проблема: почему-то начинается обсуждение, касающееся чего угодно — обложки, личного мнения о сотрудниках и нашей работе, о политике… обо всем, кроме, собственно, содержания. Поэтому мы там точно не очень хотим появляться часто, чтобы не надоедать и не раздражать собравшуюся публику.
Итак, в десятом выпуске «Точки РОСЫ»:
Содержание
- 1 Пользователям
- 2 База данных поддерживаемого оборудования
- 3 Linux — теперь все отлично и с играми
- 4 Новая версия HW Probe Tool 0.9
- 5 База оборудования: теперь на русском
- 6 3G интернет в РОСЕ — это просто!
- 7 ssd-utils - TRIM для SSD раз в неделю
- 8 По ту сторону пресс-релиза: поддержка ИБП Powercom в ОС «РОСА»
- 9 Настройки ROSA Fresh KDE для Full HD мониторов
- 10 Установка 32-битной версии ROSA в UEFI
- 11 Установка ROSA в UEFI-режиме при наличии Windows в Legacy-BIOS-режиме
- 12 ROSA не обидится на ваши измены — запоминаем выбор последней загруженной системы
- 13 Порядок в шведской семье или ссылки в Grub-меню
- 14 РОСе нужен ты и твой ноутбук! Тестируем Secureboot
- 15 Загрузка и установка РОСЫ со своего же HDD
- 16 Urpmi - автоматическое добавление источников при установке пакетов по сети
- 17 Автоматическое обновление метаданных в urpmi
- 18 Screenpen — магия пера или эффективная свобода преподавания со стилусом
- 19 Установка
- 20 Скромный GUI для ROSA Freeze
- 21 ROSA Cloud Connector - упрощаем связь с облаками
- 22 Откапываем забытый Tray — панель уведомлений снова видна в режиме обзора
- 23 PDF-браузинг у нас в GNOME ОК
- 24 Закладки в Nautilus — теперь их делать удобней
- 25 Аналог групповых политик для Chromium в Linux
- 26 Как не только фоточки скопировать… или дело о двух гигабайтах и коротком целом типе
- 27 WBEM — открываем возможности локализации
- 28 Какие рабочие столы вы используете в дистрибутивах ROSA? Опрос…
- 29 Как вам наши темы для GNOME? Видеоопрос
- 30 Пресс-релизы по релизам
- 31 ROSA Desktop Fresh R3 «GNOME»
- 32 ROSA Fresh Desktop R4
- 33 ROSA Fresh Desktop R4 LXDE
- 34 ROSA Fresh Desktop R5 KDE
- 35 ROSA Fresh Desktop R5 LXDE
- 36 ROSA Desktop Fresh R5 GNOME
- 37 Мейнтейнерам
- 38 Spec-gen - генерируем spec-файлы для программ на GNU Autotools и CMake
- 39 ABF - кэшированный chroot и улучшенные тесты
- 40 Наши инструменты в дистрибутиве Debian
- 41 Наш Pkgdiff используется на fossies.org
- 42 ABF - новый бэкенд, новый дизайн и новые возможности
- 43 Конференции, мероприятия и прочая движуха
- 44 Компания "РОСА" участвует в слете ИТ-специалистов IT CAMPUS
- 45 Курсы "РОСЫ" - на сайте PC Magazine RE
- 46 «НТЦ ИТ РОСА» на «Инфобереге 2014» — итоги участия
- 47 Обзор юзабилити-конференции ProfsoUX-2014
- 48 Официальная новость по итогам IT Campus 2014
- 49 ITCampus-2014
- 50 Приглашаем на ROSS 2015 — Russian Open Source Summit
- 51 Приглашаем на конференцию «Свободное программное обеспечение в Высшей Школе»
Пользователям
- Hardware
- Тестируем на зоопарке десктопов и ноутбуков, все для надежной работы.
-
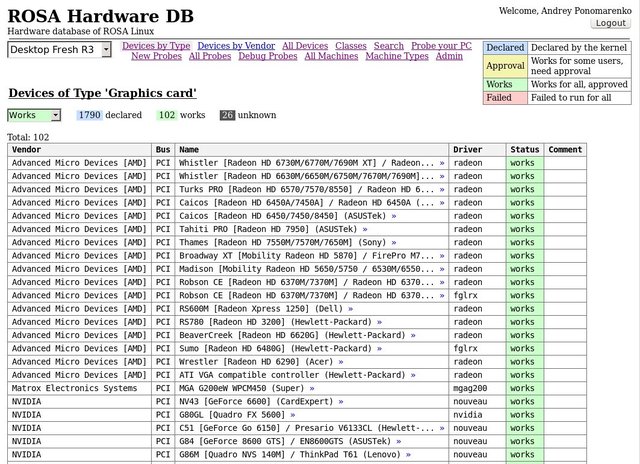
База данных поддерживаемого оборудования
С сентября 2016 года стала доступна обновленная версия базы оборудования.
На сегодняшний день на рынке предлагается огромное количество разнообразных конфигураций персональных компьютеров. При разработке операционной системы РОСА мы прилагаем существенные усилия для поддержки всевозможных конфигураций.
Еще пять лет назад при разработке первых версий операционной системы и до недавних пор мы использовали стандартный для отрасли метод взаимодействия с пользователями. Если у пользователя что-то не работало, то он сообщал об этом на нашем форуме или в багзилле. Затем команда поддержки начинала выяснять у пользователя характеристики компьютера, системные логи и др. Все эти многочисленные данные собирались в комментариях к соответствующему багу и затем анализировались разработчиками на возможность исправления проблемы. Главный минус такого подхода был в том, что от пользователя требовалось слишком много действий и отладка проблемы растягивалась на недели, а иногда и на месяцы.
Для упрощения процесса взаимодействия с пользователями мы разработали инструмент hw-probe. Инструмент предназначен для сбора на компьютере пользователя всей необходимой информации для анализа и отладки его проблемы. При этом от пользователя требуется выполнить всего лишь одну команду:
hw-probe -all -upload
Создать пробу можно как на установленной системе, так и из Live-режима. Перед вызовом команды желательно подключить максимальное количество периферийных устройств, чтобы они также были проанализированы, и обновить соответствующий пакет:
sudo urpmi.update -a sudo urpmi hw-probe
Теперь пробу оборудования компьютера можно сделать еще проще, кликнув на иконку "Проба оборудования" в стартовом меню SimpleWelcome.
В результате запуска команды информация обо всем оборудовании на компьютере, системные логи инициализации и др. информация будет загружена в нашу базу данных для последующего анализа разработчиками. Пользователю при этом будет выдана ссылка на пробу его оборудования, которую он может приложить к сообщению на форуме, багу или поделиться со знающими людьми, которые могут помочь с решением проблемы (пример пробы для ASUS N73SV здесь). В результате такого механизма взаимодействия, проблемы на компьютерах пользователей теперь решаются гораздо быстрее.
Пакет hw-probe является базовым для дистрибутива РОСА Desktop Fresh R4 (и всех будущих версий). Обязательно обновите этот пакет перед использованием, чтобы загрузить в базу наиболее полные результаты тестов. Пользователям других версий ОС РОСА или других дистрибутивов необходимо следовать этим инструкциям.
Адрес базы данных: hw.rosalinux.ru/.

На основе всех собранных проб оборудования пользователей, а также статического анализа драйверов ядра автоматически создается база данных поддерживаемого оборудования. Ознакомиться с базой данных можно на сайте hw.rosalinux.ru/. В ней можно, например, посмотреть список всех протестированных видеокарт или список всех WiFi-карт, поддержка которых заявлена ядром. Также можно посмотреть список и классификацию всех протестированных моделей компьютеров. Для классификации устройств мы используем ядерную классификацию соответствующих драйверов. Для PCI и USB устойств дополнительно используется более тонкая классификация по идентификатору класса устройства.
В этой заметке мы призываем всех пользователей операционной системы РОСА загрузить пробы своего оборудования с помощью вышеприведенной команды для пополнения списка поддерживаемого оборудования. Максимальное количество подключенных к компьютеру периферийных устройств при снятии пробы - приветствуется. В случае, если какое-то устройство не функционирует, то просьба также описать проблему на нашем форуме, в багзилле или на странице вконтакте.
-
Linux — теперь все отлично и с играми
Продолжим тему развлечений на «ROSA». О видео мы уже поговорили, обсудим ситуацию с играми.
Тут ситуация улучшается с каждым днем. Еще пару лет назад, любой, «переходивший на линукс» пользователь, был вынужден прощаться с своими любимыми игрушками, как расставались с друзьями и родственниками эмигранты из СССР.

Т.е. игры под Linux конечно были. Но, в основном, это open-source проекты энтузиастов, и среди тысяч пакетов с играми преобладали игры с несложной графикой: «казуальные» игрушки-головоломки, разные шахматы и карты, простые «аркадные» стрелялки-бродилки — и некоторым достаточно и этого, я повидал многих, кому на компьютере достаточно пасьянса и Lines.
Впрочем, теперь новый уровень «казуальщины» — это броузерные игры на Flash и HTML5 — и теперь можно растить веселую ферму и рубиться в сетевые стратегии с друзьями, вовсе не задумываясь, какая система установлена, и что вообще нужно что-то инсталлировать. И с этим все ОК, ибо слава Мозилле и работающему Flashу, тут все одинаково[1].
Но все это, увы, было недостаточно для подлинных игроков.
- «Казуальщина» не дотягивает по уровню (графика, геймплей) до самых известных и популярных игр, скажем так, игр класса AAA, блокбастеров и бестселлеров, игр требующих 146% возможностей процессора и видеокарты.
- Нет, конечно под Linux есть нестыдные open-source игры, вполне почти «профессионального» уровня, например, 0 A.D., Battle For Wesnoth, Xonotic, AstroMenace, Speed Dreams, но их не так много, покрыты не все жанры, плюс соображения следующего пункта…
- И, наверное, самое важное — тут срабатывает импринтинг, ко многим популярным играм настолько привыкаешь, что расставание, или замена на аналоги, увы, не катит.
- Не говоря о играх, в которых с друзьями рубишься по сети, или просто обсуждаешь прохождение — и тут аргументы «да XXX нет, но есть похожий YYY» — не катит. Так FreeCIV не заменит пятую цивилизацию, а любая трехмерная стрелялка не заменит CS.
Поэтому игроману приходилось для таких игр
- либо держать отдельный раздел с DOS/Windows — это более-менее ОК для игр-«стрелялок» требующих 100% CPU и твоего внимания, это вполне разумно («делу время, потехе час»), то в разные пошаговые стратегии можно играть параллельно с офисной работой, и тут нужна нативность для мгновенного переключениям между приложениями.
- либо использовать разнообразные эмуляторы, типа PlayOnLinux или даже DOSBox, для совсем древних игр. В большинстве случаев, это, кстати, работает, например, у меня, к моему удивлению, работала даже пятая цивилизация, с настройками графики чуть хуже, чем под DirectX. Но все-таки это как-то не комильфо — и не так эффективно, и возможны странные баги.
Прогресс тут резко пошел за последнюю пару лет, и связан он со Steam — теперь наверно, самой известной инфраструктурой игровой дистрибьюции от компании Valve. Эта компания известна
- и в мире разработчиков, удивительным внутренним процессом, напоминающим то ли раздолбайство, то ли советское НИИ[2].
- и в мире игроманов, за кучу эпичных бестселлеров, из которых серии Half-Life и Counter Strike знакомы всем, даже далеким от игр.
Но самое известное и важное направление — это построение Steam, собственной игровой инфраструктуры с нуля, от непосредственно железа и приставок SteamBox со Linux-based SteamOS, чтобы не зависить ни от каких вендоров (операционных систем или консолей). И именно эта движуха и заинтересовала Linux-ом игроделов. Да, это не первая система цифровой дистрибьюции с Linux-играми, есть ведь и Desura, но первая, набравшая критическую массу и захватывающая всю вертикаль, от железа до пользователя.
Сложно конечно однозначно сказать, что именно повлияло на игровых производителей:
- Есть факты, что Linux-пользователи Steam оказались даже платежеспособней, чем Windows-стимеры (покупают больше игр, больше платят при распродажах «заплати сколько хочешь»), т.е. потенциально это выгодная аудитория, а не сборище халявщиков. Кстати, интересно посмотреть Steam-статистику → [1], [2].
- Есть мнение, что для игроделов всегда выгоднее разработка под консоли, игровые приставки с фиксированными характеристиками — меньше проблем с зоопарком железа, больше профита, ибо консоли — для истинных геймеров, там больше играют, и тратят деньги на закупку игр или транжирят внутри игры. И чтобы попасть на эту новую консоль, уже сейчас надо разворачиваться и учиться делать Linux-совместимые игры.
Так что, если сначала парк Linux-игры пополнялся в основном малобюджетными инди-играми от одиночек или небольших студий, то сейчас, пошло портирование блокбастеров от крупных издательств.
Смотрите сами, в TOP10 уже 8 Linux-совместимых (да и если смотреть топ игр дальше — чуть похуже, но все равно, Linux-совместимости все больше и больше).
| Ежедневный максимум | Всего игроков | Игра | |
| 570,308 | 784,569 | Dota 2 | |
| 71,549 | 149,145 | Counter-Strike: Global Offensive | |
| 50,451 | 85,718 | Team Fortress 2 | |
| 27,909 | 65,717 | Football Manager 2014 | |
| 22,349 | 58,471 | Sid Meier's Civilization V | |
| 20,498 | 46,407 | Garry's Mod | |
| 18,623 | 31,806 | Counter-Strike |
Лично для меня «переломным моментом» стало портирование в мае «Civilization V» (кстати, тут можно публично пообщаться на эту тему с ее разработчиками).
А исторические стратегии от Paradox уже давно Linux-совместимы — Crusader King II портировали еще год назад, а Europe Universalis IV уже вышла Linux-рожденной.
Лично я как-то больше любитель неспешных стратегий, вот например, «мой стим»:
.png)
Да, проблемы с портированием еще есть — некоторые компании стремятся выпустить линукс-версию «как-нибудь побыстрее, хоть тушкой, хоть чучелом» — и некоторые Linux-порты теряют в качестве: либо это перенос путем встраивания Wine-эмулятора, либо разработку линукс-версии аутсорсят, либо почему-то нет локализации…
Все это огорчает, но тренд очевиден — нет уже никакой эмиграции, и «игровая граница» между Linux и Windows почти стерта — самое важное уже работает под Linux, остальные Steam Windows-игры можно запустить из под PlayOnLinux, и кстати, Steam предлагает еще один вариант Linux-Windows гетерогенности — «стриминг».
Можно продолжать держать Windows-десктоп для игр, а играть в них лежа на диване даже с слабеньким Linux-ноутбуком, при этом десктоп пыхтит и рендерит игровые картинки, а Linux-ноутбук удаленно управляет этой игрой, не напрягаясь и не перегреваясь. Это конечно, не очень подходит к стрелялкам, но ко всему остальному — совершенно замечательно.
У нас Steam беспроблемно устанавливается и работает, в этом уже нет нашей заслуги — если раньше, еще год назад (скажем, для тех, кто в теме, во времена «steamhack-а»), нам приходилось делать какие-то хаки и патчи — подкладывать отстутствующие файлы шрифтов и делать симлинки на библиотеки и т.п. (ведь бета Steam-клиент был «захардкожен» под Ubuntu), то сейчас — это такой же steam, как и у всех.
Кстати, мы думаем, а не стоит ли Steam включить в образ? С одной стороны, вроде идея хорошая, с другой:
- все равно потребуется интернет для инсталляции игр, а тогда можно поставить Steam из репозиториев.
- надо будет договариваться с Valve, обсуждать юридические тонкости — а это непросто. Ибо известно, что почти нереально дождаться от Valve ответов на свои запросы.
- кому-то может не понравится наличие «проприетарщины»…
Но спросим:
Идея включить Steam-клиент в инсталляционный образ дистрибутив ROSA Fresh…
|
А работоспособность же игр, определяется именно здоровьем графической системы в дистрибутиве.
Чтобы все было гладко с X-ами, MESA-библиотеками, и драйверами видеокарточек, чтобы были наложены все важные патчи в непротиворечивой комбинации, и все это было проверено.

Так вот, даже в головном офисе, мы постоянно тестируем нашу графическую подсистему на куче ноутбуков и на тестовом стенде для проверки графических карт, где мы прогоняем нашу коллекцию — видеокарт, от слабенького старья, до современных профессиональных. И это не говоря уже о куче оборудования нашей распределенной по миру QATeam.

При тестировании мы используем и широко известные Phoronix-тесты, так и ручное «проигрывание» Steam-коллекций сотрудников[3].

Про процесс тестирования, впрочем, надо писать отдельную статью, а пока лишь отметим, что в целом, если технические требования игры удовлетворены, то скорее всего, все будет хорошо, и главная нетривиальность — не забыть поставить правильный видеодрайвер. Скорее всего, наиболее эффективным будет проприетарный драйвер видеокарточки, и для его инсталляции достаточно лишь запустить нашу утилиту XFdrake, которая сама все скачает и настроит[4].
Мы кстати, размышляем, надо ли как-то напоминать или предлагать запускать XFdrake при первом подключении к сети? Именно в этот момент можно проверить, есть ли проприетарные драйвера AMD/Nvidia для видеокарты, и предложить их использовать.
|
Так что еще раз отметим
- все что может играть под Linux — популярные open-source игры, все Linux-игры из Steam,
эмуляторы DOSBox и PlayOnLinux — все работает,
- графическую подсистему тестируем, нужные патчи проносим,
- есть XFdrake — утилита, которая автоматически поставит проприетарные драйвера для видеокарт.
И теперь, искренне, а не на правах рекламы, мы можем направить вас в Steam за Linux-играми, в котором до 30 июня идет традиционная летняя распродажа! А многие теперь получают удовольствие именно от покупки («раньше мы играли в игры, за которые не платили, теперь платим за игры, в которые не играем»), делая запас на будущее, для игр с детьми и т.п.

Ну и в конце, для дочитавших — бонус. Краткий обзор Unity of Command — не очень популярной, но увлекательной пошаговой стратегии основных сражений Великой Отечественной Войны.
Игра подробно описана в Википедии, но если кратко — это совершенно нетребовательные к ресурсам «историческо-военные шахматы» на реальных картах ВОВ. Игра сейчас ужасно кажется актуальной — и из-за недавней даты 22-июня, и из-за часто мелькающих сейчас в новостях топонимов «Славянск», «Изюм», «Донбасс» вместе с словосочетаниями «танковая атака», «окружение» и т.п.
Я играл вместе с сыном-младшешкольником[5], совершенно наглядным образом объясняя-показывая
- и важность снабжения (без него любое сопротивление стихает максимум через неделю), на которую не общают внимания во многих стратегиях.
- тактические приемы танковых прорывов, окружений, блицкригов.
- почему кавалерия вполне рулила в ВОВ, несмотря на танки.
- важность мостов, перекрестков и железных дорог,
- стойкость солдат разных армий («почему под Сталинградом надо прорываться через румынские дивизии»)
- необходимость жертвовать войсками, чтобы выиграть позицию или время…
- географию СССР.
Как это выглядит — проще всего увидеть на короткой записи моей версии прохождения операции «Уран» с сталинградским контрнаступлением и окружением армии Паулюса:
Если не боитесь спойлеров, или вы начали играть, что-то не получается и хотелось бы подсказки, вот «блестящие победы»[6] в моем исполнении, записанные штатными средствами ROSA Fresh GNOME, см.
- «Crossing the Dnieper» — бои за Днепропетровск
- «Dneper-Donbass» — бои за Донбасс
- «Gallop Star» — Славянск, Изюм, Полтава, Запорожье
А также «Don Offensives», «Race for Rostov», «Orel-Bryansk», «Little Saturn».
Сейчас распродажа, и все это удовольствие со всеми дополнениями можно за 150р.
И наконец, перепись тех, кто дочитал до конца…
|
-
Новая версия HW Probe Tool 0.9
Мы выпустили новую версию 0.9 инструмента HW Probe Tool (пакет hw-probe) для сбора логов и характеристик компьютеров пользователей. С помощью этого инструмента пополняется база данных оборудования РОСЫ.
Новый пакет уже доступен в репозиториях и может быть обновлен командой:
sudo urpmi.update -a sudo urpmi hw-probe
В инструменте произошло 3 главных изменения.
1. Три уровня логгирования
Новая опция -log-level N (где N принимает значения mini, default и maxi) позволяет варьировать уровень логгирования.
По-умолчанию устанавливается "средний" уровень логгирования, достаточный для диагностики большинства проблем с оборудованием:
su hw-probe -all -upload -id PC_NAME
Для того, чтобы собрать минимальный набор логов для диагностики только загрузки системы и графики, нужно использовать опцию -log-level mini:
su hw-probe -all -log-level mini -upload -id PC_NAME
Для того, чтобы собрать расширенный набор логов, нужно использовать опцию -log-level maxi. Расширенный набор логов помимо стандартного набора дополнительно включает дамп ACPI-подсистемы (нужно дополнительно поставить пакет pmtools), поиск WiFi и bluetooth сетей, а также пробу таблицы маршрутизации:
su urpmi pmtools hw-probe -all -log-level maxi -upload -id PC_NAME
PC_NAME - любое короткое имя компьютера/пробы (не более 45 символов на латинице, в кавычках, если содержит пробелы).
2. Тесты графики
По ключу -check инструмент теперь запускает минимальный тест работоспособности графики с помощью команды glxgears (из пакета mesa-demos).
hw-probe -all -check -upload -id PC_NAME
Тест пока запускается не на всех комбинациях графических карт и драйверов. Например, не поддерживается тестирование NVidia-карты на проприетарных драйверах и тестирование дискретной карты в гибриде с Intel-картой на свободных драйверах. Но скоро эти тесты будут добавлены.
В будущем, помимо тестов графических карт, планируется добавить тесты и для других устройств.

3. Больше системных логов
Теперь инструмент собирает логи звуковой, wifi, bluetooth и других подсистем. Собирается journalctl предыдущей загрузки.
Полный список новых логов:
- grub.cfg
- journalctl.1
- alsactl
- amixer
- aplay
- arecord
- boot.log
- codec
- cpuinfo
- df
- dkms status
- fdisk
- fstab
- hciconfig
- input/devices
- ioports
- iw list
- iwconfig
- /lib/modules
- lsblk
- meminfo
- mount
- nm-tool
- nmcli
- ps
- pstree
- rfkill
- /sys/class
- udevadm
- xdpyinfo
- xmodmap
Опциональные (по ключу --log-level=maxi):
- acpidump
- iw scan
- hcitool scan
- route
-
База оборудования: теперь на русском
Встречайте базу оборудования РОСЫ на русском языке! Теперь можно изменить язык с английского на русский с помощью переключателя справа сверху на странице.
Изначально база проектировалась на английском языке для охвата наиболее широкой аудитории пользователей. И это было правильно, так как пробы своих компьютеров в итоге загружали не только пользователи из России, но и из Италии, Франции, Австрии, Германии, Казахстана, США, Украины, Польши, Бельгии и др. стран. Но все же абсолютное большинство проб своих компьютеров загрузили из России. Поэтому мы потрудились и перевели интерфейс базы на приятный глазу русский язык.
Интерфейс базы данных доступен, как обычно, по адресу: hw.rosalinux.ru.

Замечания по переводу пишите здесь в комментах, на форуме, на странице вконтакте или в нашей багзилле.
-
3G интернет в РОСЕ — это просто!

Наиболее распространенными способами подключения к интернету на сегодняшний день на домашних и офисных компьютерах являются подключение через Ethernet-кабель (LAN) или с помощью WiFi-карты (WLAN). Если вам понадобится интернет на персональном ноутбуке за пределами офиса, за пределами города или за пределами зон действия точек доступа WiFi, то предыдущие два способа не работают. В такой ситуации вам могут помочь 3G или CDMA каналы интернета. Для использования этих каналов нужен либо встроенный в ноутбук модем, либо USB-модем. Сим-карту можно взять из телефона, который всегда при себе, и установить в модем или специальный слот в ноутбуке.
В отличие от WiFi и Ethernet сетей, Network Manager не отображает список доступных 3G и CDMA сетей по-умолчанию. Однако, добавить нужные соединения довольно просто. Рассмотрим последовательность подключения к 3G и CDMA интернету на примере встроенного Mini PCIe-модема Ericsson F5321 и внешнего USB-модема Airplus MCD-650 соответственно на ноутбуке Dell Latitude E6530.
- Для начала надо подключить модем, открыть окно менеджера сети и поставить галочку «Mobile broadband».
- Затем надо открыть Настройки/Connection/Add/Mobile Broadband.
- Затем выбрать «Any CDMA device», «Any 3G device» или конкретное устройство («Ericsson MBM MBIM [413C:818E]» в моем случае для встроенного модема) в списке устройств.

- Далее нужно выбрать страну и провайдера связи (MTS, Skylink, Beeline и др.).

- На последнем шаге будут отображены автоматически заполненные менеджером параметры соединения (Номер, Имя пользователя, Пароль и др.) для выбранной сети.

- Во вкладке «General configuration» можно поставить галочку «All users may connect to this network», чтобы соединение устанавливалось автоматически после перезагрузки компьютера.
- После нажатия на «OK» соединение будет установлено и можно пользоваться интернетом.


Прилагаем также пробы компьютера (снимки состояния железа и системных логов) с настроенным интернетом, чтобы можно было сравнить настройки и логи: 132c298397 на Mini PCIe-модеме Ericsson F5321 и f9d3a09989 на USB-модеме Airplus MCD-650.
-
ssd-utils - TRIM для SSD раз в неделю

Как известно, принципы работы solid-state дисков (SSD) значительно отличаются от таковых для HDD.
Если файловая система это поддерживает, полезно время от времени передавать SSD информацию о том, какие блоки данных больше не используются (удалённые файлы и т. д.). Это, как минимум, позволяет избежать постепенного снижения производительности SSD.
Операция TRIM как раз предназначена для таких целей. Для большинства современных SSD она доступна. Широко используемые в Linux файловые системы ext4, btrfs, xfs и некоторые другие TRIM поддерживают.
Есть два основных варианта работы с TRIM:
- Выполнять TRIM после каждого удаления файла, — например, для ext4 этот режим включается, если при монтировании файловой системы задать опцию discard. Как правило, не очень удобно: TRIM требует времени, так что если эту операцию делать часто, то время выполнения операций с файлами на SSD может даже возрасти.
- Запускать время от времени команду fstrim — при этом TRIM будет выполнена для всех освободившихся блоков данных в файловой системе.
Ubuntu пошла по второму пути, начиная с версии 14.04. А теперь это есть и в ROSA Fresh R4 — достаточно установить пакет ssd-utils.
ssd-utils выполнит fstrim сразу после установки (для тех файловых систем, где это поддерживается), а также настроит автоматический запуск fstrim раз в неделю.
Стоит заметить, что если используются шифрованные разделы, RAID, devmapper и т. п., то может понадобиться вручную настроить всё это, чтобы запрос на выполнение TRIM от файловой системы мог добраться до собственно SSD.
Кроме этого, как и в Ubuntu, fstrim по умолчанию будет запускаться только для SSD от «проверенных» производителей. В данный момент это:
- Intel
- Samsung
- OCZ
- SanDisk
- Patriot
С SSD от некоторых других производителей бывали проблемы, приводившие к повреждению файловых систем. Впрочем, если у Вас есть SSD другого производителя и Вы уверены, что с этим SSD всё в порядке, можно включить fstrim и для него. Для этого достаточно добавить опцию --no-model-check для fstrim-all в /etc/cron.weekly/fstrim.cron (подробности — в комментариях в этом файле).
-
По ту сторону пресс-релиза: поддержка ИБП Powercom в ОС «РОСА»

Недавно на сайте компании была опубликована новость про поддержку источников бесперебойного питания POWERCOM в ROSA Fresh и ROSA X1. В связи с подобными ситуациями я почти постоянно встречаю такое мнение на различных ИТ-ресурсах, мол, что тут сложного — взять да собрать тот же NUT (или какой-то другой пакет в зависимости от ситуации)? Но не всё так просто, как кажется со стороны. На примере добавления поддержки ИБП конкретного вендора расскажу, что на самом деле кроется за сухими строками официального пресс-релиза.
Собственно, помимо сборки nut (который был у нас изрядно устаревшим на тот момент), была проведена работа по приведению спеков и конфигурационных файлов nut в порядок согласно реалиям и политикам дистрибутива. К таким вещам можно отнести новые unit-файлы для systemd, зачистку самого spec-файла от всевозможных рудиментов и хаков, доработку и написание post и preinstall скриптов и т.п.
Как я уже упоминал, недостаточно просто собрать пакет. Одно из требований заказчика — работа ИБП без проведения каких-либо сложных манипуляций. Связано с тем, что в ОС «РОСА» будут работать вчерашние пользователи Windows, которые, к вящему неудовольствию некоторых особо продвинутых товарищей, не умеют работать с консольными приложениями, а словосочетание «эмулятор терминала» их повергает в священный трепет. К тому же работать программа должна на самых разных конфигурациях оборудования. Посему любимый номер посетителей линукс-форумов «сделаем за пять минут на скриптах» тут не пройдёт. Для решения проблемы в офис были доставлены ИБП POWERCOM и написано много новых правил udev, позволяющих запускать нужные модули и приложения, требуемые для корректной работы ИБП, сразу после втыкания кабеля USB в разъём. Для начала неплохо, но этого мало.
В процессе тестирования от будущих эксплуатантов была получена жалоба на то, что несмотря на заметное упрощение работы, всё равно много действий приходится выполнять вручную. И как вы уже догадались, пользователям приходится залезать в консоль ради дополнительных действий. В процессе обсуждения данной проблемы было предложено измененить конфигурацию по умолчанию, чтобы иметь возможность подключить к компьютеру подавляющее большинство ИБП, включая оборудование POWERCOM, не выполняя ровным счётом никаких действий. Что и было сделано. Ни дать-ни взять — Plug’n'Play, каким видит его Microsoft :) Для мониторинга показаний оборудования было собрано на выбор несколько приложений, имеющих графический интерфейс, из которых больше всего понравился KNutClient для среды KDE. Впоследствии у этого приложения исправили несколько небольших ошибок и переделали локализацию, бывшую на тот момент в крайне плачевном состоянии.
На этом этапе история не закончилась. Через некоторое время от тестеров POWERCOM пришла ещё одна жалоба, что ИБП нельзя настроить по своему вкусу. Например, использовать не прошитые в ПЗУ оборудования настройки уровня разряда батарей, а задать свои. И да, пользователям для перенастройки оборудования всё ещё требуется доступ к консоли. Так что для настройки параметров ИБП необходимо было иметь программу с графическим интерфейсом, дабы пользователь не сломал чего в процессе редактирования. В очередной раз были внесены изменения в основной конфигурационный файл, позволяющие переназначать настройки, зашитые в ПЗУ ИБП. Для минимизации действий, производимых с использованием консоли, была найдена программа knutsetting. Впрочем, поначалу толку от неё не было. Knutsetting находилась в абсолютно неработоспособном состоянии, вываливала совершенно невразумительные ошибки в процессе использования и создавала проблемы самим пользователям. Начиная от нерабочей аутентификации приложения в среде KDE, заканчивая порчей конфигурационных файлов. Причём порча файлов всплыла совершенно случайно в процессе обработки совершенно другой жалобы и возникала только в определённой конфигурации демона nut. Как бы то ни было, причины ошибок были найдены и устранены, добавлена отсутствующая русская локализация, и только после этого программа была добавлена в репозиторий.
Итог всей проведённой работы: система получила штатное средство управления и настройки источников бесперебойного питания, доступное не только ИТ-специалистам, но и обычным пользователям.
|
-
Настройки ROSA Fresh KDE для Full HD мониторов
На рынке персональных компьютеров все больше появляется ноутбуков с разрешением монитора 1920 на 1080 точек (Full HD). На таких экранах помещается гораздо больше информации, чем на экранах с разрешением 1600x900 (HD+) или 1366x768 (HD) — можно уместить единовременно на экране несколько окон приложений или много строк и ячеек больших тиблиц. Однако при этом все иконки, текст и картинки слишком маленького размера. Это может быть неудобным для людей с плохим зрением или слишком напрягать глаза у работяг-программистов, проводящих по десять часов в день за компьютером.
Ситуацию не меняют даже экраны с большой диагональю 17.3 дюйма — размеры элементов все-равно слишком мелкие. Частично проблема в том, что современные компьютеры выпускают с широкоформатными экранами с отношением ширины и высоты 16:9, то есть экраны слишком широкие, но низкие. Из-за этого все элементы уменьшаются пропорционально высоте экрана. Ширина же экрана на размер элементов не влияет. Еще несколько лет назад выпускались экраны с отношением сторон 4:3 и 16:10, что обеспечивало достаточную высоту экрана для работы на больших разрешениях, но теперь такие экраны выпускать экономически невыгодно.
Казалось бы, почему на смартфонах с разрешением Full HD и такими маленькими экранами нет проблем с размерами элементов? Все из-за того, что приложения и операционные системы для мобильных устройств разрабатываются специально под устройство с заранее известным и фиксированным разрешением. В мире персональных «универсальных» компьютеров все иначе. Здесь заранее не известно, на какой компьютер и с какими характеристиками будет установлена операционная система. Поэтому по-умолчанию размер элементов устанавливается маленьким, чтобы по максимуму использовать преимущество экрана с высоким разрешением и освободить пространство рабочего стола.
В этой статье я расскажу, как настроить РОСУ для комфортной работы на экране с высоким разрешением.
Рассмотрим снимок экрана Full HD с настройками по-умолчанию:

А так выглядит Simple Welcome:

Размер текста везде очень маленький, слишком мелкие иконки в трее и с ними неудобно работать, особенно при использовании тачпада вместо мыши.
Рассмотрим два подхода для изменения размеров графических элементов.
Изменение шрифтов системы и приложений
Первый подход заключается в изменении размера шрифтов операционной системы и приложений. Для этого надо открыть настройки рабочего стола «Configure Your Desktop» и выбрать настройки вида приложений «Application Appearance» и далее шрифты «Fonts».

Как можно видеть, размер основного «General» шрифта выбран 10, то есть слишком маленький для такого разрешения. Поэтому его надо увеличить, например, до 12. Также можно увеличить размер шрифты заголовков окон «Window title» и шрифтов меню «Menu» также с 10 до 12.

Теперь посмотрим еще раз на рабочий стол:

Размеры заголовков, названий папок и накопителей в обозревателе Dolphin стали больше. Однако размер шрифта в браузере Firefox остался прежним, увеличился лишь размер заголовка окна. То есть это приложение не масштибируется согласно системным настройкам. К сожалению, это недостаток многих приложений на сегодняшний день. Поэтому в приложениях, которое вы используете, могут потребоваться дополнительные настройки размеров графических элементов. В случае браузера Firefox, например, надо установить плагин «Theme Font & Size Changer». С помощью плагина можно увеличить размер шрифта, скажем, до 16:

Также можно порекомендовать использование встроенной функции браузера «Zoom» (View/Zoom, Ctrl++ и Ctrl--) при просмотре страниц с маленьким шрифтом. Также бывает полезной настройка «View/Zoom Text Only» для увеличения только размера текста, при этом размеры картинок и таблиц остаются прежними.
Изменение разрешения экрана
Для изменения разрешения экрана могут быть использованы настройки экрана и монитора «Display and Monitor» в настройках рабочего стола «Configure Your Desktop»:

На снимке можно видеть список доступных разрешений. К сожалению среди них нет ни одного нужного разрешения для экрана с соотношением 16:9 (только для 4:3). Это баг 5025, который будет исправлен в будущих версиях X11.
Для того, чтобы добавить нужное разрешение (например, 1600x900) необходимо в терминале выполнить команду:
cvt 1600 900
Эта команда вычислит подробные параметры для настройки монитора соответствующие стандарту VESA:
# 1600x900 59.95 Hz (CVT 1.44M9) hsync: 55.99 kHz; pclk: 118.25 MHz Modeline "1600x900_60.00" 118.25 1600 1696 1856 2112 900 903 908 934 -hsync +vsync
Теперь нужно добавить к списку разрешений 1600x900:
xrandr --newmode "1600x900" 118.25 1600 1696 1856 2112 900 903 908 934 -hsync +vsync xrandr --addmode LVDS1 "1600x900"
Здесь LVDS1 — название встроенного монитора ноутбука. Его можно узнать из вывода команды xrandr --verbose.
Чтобы применить нужное разрешение выполняем команду:
xrandr -s 1600x900
Мы написали универсальный скрипт set-HD+.pl, который делает нужные команды для понижения разрешения. Чтобы разрешение сохранилось после перезагрузки, необходимо добавить этот скрипт в Autostart:

После смены разрешения и системных шрифтов рабочий стол выглядит так:

А Simple Welcome вот так:

Теперь шрифты достаточно большие, чтобы не уставали глаза, а иконки в трее стали больше и теперь с ними удобнее работать.
Если же во время работы потребуются возможности Full HD монитора, то всегда можно переключиться обратно на высокое разрешение командой:
xrandr -s 1920x1080
Выводы
В случае, если вы хотите сохранить преимущества Full HD монитора, вам следует использовать первый подход и настроить системные шрифты и шрифты приложений нужным образом. Если вам не нужно столь высокое разрешение в повседневной работе или у вас нет желания масштабировать каждое приложение, то вы можете использовать второй подход и просто уменьшить разрешение монитора.
- Инсталляция и загрузка, системы и программ
- Самый ключевой процесс, мы стараемся сделать так, чтобы поставить систему можно было в любой ситуации и она надежно грузилась. Стараемся улучшить и процесс установки новых программ, который, по привычке, многие пользователи также называют «инсталляцией» или «загрузкой».
-
Установка 32-битной версии ROSA в UEFI
Официально 32-битная версия ROSA не поддерживает установку в UEFI-режиме, и тому есть серьёзные причины. Но, как известно, если очень хочется, то можно. В данной статье мы расскажем, как это сделать и каких проблем ожидать.
Основные препятствия
С чем же связано отсутствие UEFI-поддержки? Главных причин три:
- В отличие от 64-битных операционных систем, 64-битные UEFI не поддерживают запуск 32-битных EFI-приложений.
- Практически все UEFI-платформы, присутствующие на рынке, — 64-битные. 32-битных очень мало (в основном, старые Apple Mac и некоторые Atom-ные системы).
- Если битность загруженного ядра не совпадает с битностью UEFI, невозможно обращаться к функциям прошивки (в частности, добавлять свой загрузчик).
Тем не менее, 64-битный EFI-загрузчик может загружать и 32-битное ядро, поэтому такая установка в принципе возможна.
Процедура установки
Здесь мы предполагаем, что у вас обычная 64-битная UEFI-система. Для 32-битного UEFI процедура сильно отличается. Статья об установке на такие системы будет написана, если появятся соответствующие запросы от пользователей.
Установка в качестве дополнительной системы
Проще всего, если вы хотите поставить 32-битную ROSA в паре с 64-битной: в этом случае UEFI-загрузчик будет управляться 64-битной версией дистрибутива.
Процедура установки:
- Сначала устанавливаем 64-битную версию; перезагружаемся.
- Загружаем и записываем на флэшку или DVD-диск один из последних автотестированных образов 32-битного дистрибутива (в официальном релизе R5 имеются определённые недоработки, которые для данного сценария будут критичными).
- Загружаемся в Legacy-режиме и начинаем установку. Важные особенности:
- Не забываем подключить EFI-раздел в /boot/efi. Поскольку мы в Legacy-режиме, контроля этого шага со стороны инсталлятора не будет.
- Если у вас отдельный /boot-раздел, не устанавливайте в него одновременно 32-битную и 64-битную версии ROSA: файлы ядер и initrd имеют в этих двух системах одинаковые имена, в результате они будут перезаписаны, и загружаться сможет только один из дистрибутивов.
- Если у вас таблица разделов GPT (что настоятельно рекомендуется делать для UEFI), инсталлятор предупредит, что на этот диск невозможно будет установить Legacy-загрузчик. Это нормально, просто жмём «Далее» («Next»).
- На этапе установки загрузчика нажимайте кнопку «Пропустить» («Skip»).
- После завершения установки перезагружаемся, включаем UEFI-режим и загружаемся в 64-битную ROSA.
- Открываем консоль, переходим командой su в режим суперпользователя и запускаем:
update-grub2
- Теперь у нас в загрузочное меню Grub2 добавилась и 32-битная версия, можем перезагружаться в неё.
Меры предосторожности:
- Находясь в 32-битной версии, никогда не выполняйте установку загрузчика. Если вы это сделаете, то 32-битный Grub2 может перезатереть собой имеющийся 64-битный загрузчик, и вы больше не загрузитесь. Придётся запускать Live-систему и проводить восстановление загрузчика.
- После обновления ядра в 32-битной версии вам потребуется загрузиться в 64-битную и снова выполнить оттуда команду update-grub2. Собственно говоря, это требуется делать при любой мультисистемной установке и не является особенностью именно 32-битной версии, но напомнить нелишне.
Установка в качестве единственной системы
В этом случае установка и дальнейшее обслуживание несколько усложняются, но в целом отличаются не сильно. Основная сложность заключается в установке загрузчика, что невозможно сделать из 32-битного кода. Поэтому если у вас UEFI не поддерживает ручное создание пунктов загрузки, вам потребуется ещё и 64-битный дистрибутив. Если у вас имеется второй компьютер, можно будет перезаписать флэшку на нём. Если нет — запаситесь второй флэшкой и запишите 64-битную версию на неё заранее, поскольку этот дистрибутив понадобится в тот момент, когда свежеустановленная система ещё не загружается (то есть скачать и записать образ из неё не получится).
Процедура установки:
- Как и в предыдущем сценарии, загружаем один из последних образов в Legacy-режиме.
- Выполняем установку почти как обычно, со следующими отличиями:
- Обязательно создать EFI-раздел и подключить его в /boot/efi. Поскольку мы в Legacy-режиме, контроля этого шага со стороны инсталлятора не будет.
- Если у вас таблица разделов GPT (что настоятельно рекомендуется делать для UEFI), инсталлятор предупредит, что на этот диск невозможно будет установить Legacy-загрузчик. Это нормально, просто жмём «Далее» («Next»).
- На этапе установки загрузчика нажимаем «Пропустить» («Skip»).
- После завершения установки перезагружаемся, включаем UEFI и грузимся в Live-сессию 64-битного дистрибутива.
- Открываем консоль, переходим командой su в режим суперпользователя и устанавливаем загрузчик нижеприведёнными командами. Здесь используются следующие обозначения:
- /dev/sdXY — корневой раздел раздел 32-битной системы;
- /dev/sdXZ — EFI-раздел (для команды efibootmgr имя диска и номер раздела задаются раздельно; скажем, если ваш EFI-раздел — /dev/sda3, то параметры будут выглядеть как -d /dev/sda -p 3).
mount /dev/sdXY /mnt
mount /dev/sdXZ /mnt/boot/efi
cp -R /boot/efi/* /mnt
cp /mnt/EFI/rosa/grub2-efi/grub.efi /mnt/EFI/rosa/grubx64.efi
efibootmgr -c -L rosa -l \\EFI\\rosa\\grubx64.efi -d /dev/sdX -p Z
mount --bind /dev /mnt/dev
mount --bind /proc /mnt/proc
mount --bind /sys /mnt/sys
chroot /mnt
update-grub2
exit
umount /mnt/{dev,proc,sys,boot/efi,}
sync
- Если у вас отдельные разделы для других системных каталогов (таких как /usr или /var), то в вышеприведённом списке команд их тоже необходимо подмонтировать в соответствующие подкаталоги в /mnt.
- Теперь можем перезагружаться в нашу 32-битную систему.
- После загрузки необходимо зайти в консоль и, получив привилегии суперпользователя, снова выполнить команду
update-grub2
- чтобы в загрузочное меню прописались своп-разделы для корректного восстановления системы из гибернации.
Работа с 32-битной системой:
- Не рекомендуется устанавливать в систему пакет grub2-efi, поскольку он перезатрёт собой 64-битный загрузчик, и вы можете потерять возможность загружать систему.
- Для переустановки или обновления загрузчика необходимо взять пакет grub2-efi из 64-битного репозитория, распаковать его и вручную скопировать файлы в /boot/efi по аналогии с тем, как это делалось в инструкции выше.
- Если вы хотите использовать Secure Boot, то в вышеприведённой инструкции необходимо команде efibootmgr передавать имя загрузчика не grubx64.efi, а BOOTx64.efi. В дальнейшем потребуется также следить за обновлениями пакета shim и устанавливать его 64-битную версию вручную, аналогично пакету grub2-efi.
-
Установка ROSA в UEFI-режиме при наличии Windows в Legacy-BIOS-режиме
Если у вас есть компьютер, загружающийся в режиме Legacy BIOS, но при этом сам компьютер поддерживает UEFI, и вы хотите установить на него ROSA Fresh именно в UEFI, то эта статья для вас.
Мы решили собрать тут основные проблемы, с которыми вы можете столкнуться при таком сценарии, а также (по возможности) пути их решения. Настоятельно рекомендуется сначала прочесть статью и тщательно взвесить все «за» и «против», прежде чем приступать к установке, потому что, увы, не на всех компьютерах удастся получить рабочую конфигурацию. Кроме того, перед установкой может потребоваться выполнить некоторые шаги, чтобы потом восстановить загружаемость компьютера.
Статья скомпонована в виде списка проблем и их решений.
После установки ROSA не загружается
Если у вас был Legacy-BIOS-загрузчик, то, скорее всего, на диске находилась таблица разделов MBR. В настоящее время утилита добавления загрузочного пункта UEFI не поддерживает логические MBR-разделы. Поэтому если ваш EFI-раздел (/boot/efi) является логическим (то есть имеет номер выше 4, например, /dev/sda5, /dev/sdb8 и т. п.), то загрузочный пункт добавлен не будет, и UEFI не будет знать, что загружать.
Возможные решения и обходные пути:
- Использовать таблицу разделов GPT
- Это решение подойдёт, только если у вас чистый диск или если существующие разделы и системы вам не нужны, так как конвертация MBR-диска в GPT без потери данных инсталлятором не поддерживается.
- Создать EFI-раздел как первичный (sdX1-sdX4)
- К сожалению, это не всегда возможно из-за структуры MBR.
На MBR-диске может находиться не более 4-х первичных разделов. Поэтому либо у вас будет всего 4 раздела (без возможности создавать новые), либо будет не более трёх первичных разделов, а четвёртый будет использоваться в качестве так называемого расширенного раздела, который по сути является «контейнером» для дополнительных, логических разделов. Соответственно, если у вас уже есть 3 первичных раздела и несколько логических, создать ещё один первичный раздел для EFI будет невозможно. Кроме того, даже если для первичного раздела есть свободный номер, вы не сможете его расположить между двумя логическими разделами, поскольку тогда его местоположение будет пересекаться с расширенными разделом, что запрещено.
- Вручную прописать UEFI-загрузчик
- Некоторые компьютеры (например, отдельные серии Dell Inspiron или Latitude) позволяют в настройках UEFI создавать собственные пункты загрузки. В этом случае после установки ROSA вы можете добавить такой пункт, выбрав в качестве корневой файловой системы ваш EFI-раздел, а в качестве загружаемого файла —
\EFI\rosa\BOOTx64.efiили\EFI\rosa\grubx64.efi. Если у вас поддерживается Secure Boot и вы планируете его включать, то нужно грузиться через BOOTx64.efi, если нет — можно использовать grubx64.efi напрямую.


- Автозапуск командного скрипта из EFI-раздела
- Некоторые UEFI-прошивки поддерживают автозапуск командного скрипта из EFI-раздела. Поэтому если предыдущие варианты не подошли, попробуйте загрузить ROSA в Live-режиме, подмонтировать EFI-раздел в какой-нибудь временный каталог и создать в его корне файл с именем
startup.nsh, в котором в кодировке UTF-16LE с BOM-сигнатурой должны быть прописаны команды перехода на нужный раздел и загрузки EFI-файла, например:
fs0: \EFI\rosa\grubx64.efi
- UEFI-имена разделов обычно выглядят как
BLKn:, а для распознанных файловых систем создаются псевдонимыFSn:, где n — порядковый номер. Список устройств может выводиться на экран при загрузке компьютера (если нет, попробуйте найти нужный номер перебором).
В загрузочном меню UEFI-ROSA отсутствует Windows
Legacy-загрузчик не поддерживается в режиме UEFI, поэтому Windows, установленная в Legacy-режиме, не будет искаться и добавляться в Grub-меню.
Имеющиеся Linux-системы же, напротив, будут корректно добавлены, поскольку для своей загрузки не требуют обращения к Legacy-загрузчику: имеющаяся UEFI-версия Grub2 просто обращается к файлам ядра и initrd напрямую.
С Windows такой механизм невозможен, поэтому для её загрузки необходимо отключать UEFI или явно выбирать загрузку с жёсткого диска через MBR (если в UEFI реализован Legacy-совместимый режим работы).
После установки UEFI-ROSA и переключения в Legacy BIOS перестала грузиться ранее установленная Windows
Эта проблема связана с тем, что загрузчик Windows запоминает идентификатор диска, записанный в MBR. Установка ROSA в UEFI-режиме, по неустановленным пока причинам, может этот идентификатор перезатереть.
В итоге Windows не может найти свой загрузочный диск и падает с ошибкой 0xc000000e.
Для решения этой проблемы необходимо перед началом установки ROSA проделать следующее:
- Если вы загрузились в Live-режим, то откройте консоль (Konsole); если вы в режиме установки, то переключитесь в терминал (Ctrl+Alt+F2) и залогиньтесь в аккаунт root (пароль не потребуется).
- Выполните команду:
fdisk -l /dev/sda
- Вместо
sdaукажите диск, на котором установлена Windows. На экран должно вывестись что-то вроде следующего:
[root@localhost ~]# fdisk -l /dev/sda Disk /dev/sda: 32 GiB, 34359738368 bytes, 67108864 sectors Units: sectors of 1 * 512 = 512 bytes Sector size (logical/physical): 512 bytes / 512 bytes I/O size (minimum/optimal): 512 bytes / 512 bytes Disklabel type: dos Disk identifier: 0xcea3e5ff Device Boot Start End Blocks Id System /dev/sda1 * 2048 718847 358400 7 HPFS/NTFS/exFAT /dev/sda2 718848 24680447 11980800 7 HPFS/NTFS/exFAT /dev/sda3 24680448 67108863 21214208 5 Extended /dev/sda5 24682496 28874751 2096128 82 Linux swap / Solaris /dev/sda6 28876800 41459711 6291456 83 Linux
- Нас интересует строчка
Disk identifier: 0xcea3e5ff. Здесь как раз указан текущий идентификатор, его необходимо куда-то записать. После этого можно возвращаться в инсталлятор (из терминала это делается сочетанием Ctrl+Alt+F1 или Alt+F1) и продолжать установку.
- После завершения установки надо будет загрузиться либо в свежеустановленную ROSA, либо снова в Live-режим и восстановить идентификатор. Для этого открываем консоль и запускаем:
fdisk /dev/sda
- (На этот раз без параметра
-lи, разумеется, снова указываем правильный диск.)
- Запускается консоль fdisk. Вводим последовательно следующие команды:
- x (вход в режим эксперта)
- i (смена идентификатора диска)
- далее вводим записанный нами ранее код (в примере выше это
0xcea3e5ff) - r (выход в основной режим)
- w (запись изменений и выход из fdisk)
- Если вы делаете это из установленной системы, программа может вывестись сообщение о невозможности перечитать таблицу разделов. Это нормально, но на всякий случай выполните команду
fdisk -l /dev/sda, чтобы проверить, что новая метка действительно записалась. - Всё, можно перезагружать компьютер, выключать UEFI-режим и загружать Windows.
А я потерял прежний идентификатор, что делать?
В этом случае есть возможность вытащить старый идентификатор из реестра Windows. Можно воспользоваться какой-нибудь Linux-программой визуального представления реестра, но проще обойтись тем, что под рукой.
- Монтируем основной Windows-раздел в какой-нибудь каталог, например,
/mnt. - Запускаем
mc, переходим к файлу /mnt/Windows/System32/config/SYSTEM, открываем его на просмотр (F3). - Открываем диалог поиска (F7), ищем строку
\DosDevices\C:. - Переключаемся в hex-режим (F4).

- Смотрим на шестнадцатеричные коды в районе найденной строки. Вы должны увидеть примерно следующее (чтобы легче было сопоставить коды с символами, я здесь вытянул всё в одну строку, а символы из правой колонки перенёс под соответствующие коды):
5C 44 6F 73 │ 44 65 76 69 │ 63 65 73 5C │ 43 3A 00 00 │ F0 FF FF FF │ 00 BD 10 B7 ... \ D o s D e v i c e s \ C : . . . . . . . . . . . . . .
- Как видим, сразу после найденной нами строки идут следующие байты (разумеется, в вашем случае они могут отличаться):
00 00 │ F0 FF FF FF │ 00 BD 10 B7
- Пропускаем первые 6 байт, а следующие четыре байта (
00 BD 10 B7) — это как раз и есть искомый идентификатор, записанный с обратным порядком байтов. Разворачиваем байты в нужном нам порядке, получаем B710BD00. Добавляем префикс 0x и используем этот код (0xB710BD00) в fdisk, как указано выше.
-
ROSA не обидится на ваши измены — запоминаем выбор последней загруженной системы
Времена Единственной Операционной Системы давно миновали, и сейчас вполне нормально не бессмысленно ждать Единственную и Идеальную[7], а завести себе их несколько — насколько позволяют время и силы. Для работы одну, для развлечений — другую, для высоких исследований — третью…

И ROSA не обидится на ваше непостоянство, наоборот, будет мирно сожительствовать, и поддерживать ваш выбор.
Тут на самом деле идет речь, о том, что мы прилагаем большие усилия к тестированию распознавания уже установленных операционных систем, в инсталляторе есть возможность их аккуратно «подвинуть», ужав их разделы, а совсем недавно, мы решили и запоминать, и загружаться в последнюю выбранную систему.
Это удобно, гуманно и т.п., ибо пользователем ожидается, что после перезагрузки (операции странной, вынужденной, ненужной пользователю), он окажется там, где был, а не в какой-то другой непонятной системе — многие домашние пользователи вовсе боятся загрузочного выбора, ожидая появления «настоящей системы». И даже опытному пользователю неприятно ждать при перезагрузке, чтобы выбрать то, что нужно, а нужно, с большой степенью вероятности, именно то, что было до этого. Впрочем, опытный пользователь, если и недоволен, уберет эту эвристику за пару секунд. Ведь речь идет всего-лишь о добавлении пары строчек в /etc/default/grub
GRUB_SAVEDEFAULT=true GRUB_DEFAULT="saved"
Так что если у вас даже не РОСА, а что-то другое, загружаемое GRUB2-ом, то вы можете настроить все это вручную. Не забудьте кстати вызвать sudo update-grub2, после правки /etc/default/grub.
А в новой ROSA Fresh R4, которая вот-вот выйдет, все это будет по умолчанию.
|
Так что не бойтесь поставить Росу в дополнении к вашим системам — места много не займет, не будет мешать вам ходить к вашим старым подругам… вы даже можете ее не любить — она все равно будет ждать и надежно работать для вас.
-
Порядок в шведской семье или ссылки в Grub-меню
Как мы уже писали, сейчас уже совершенно нормально держать даже на ноутбуке несколько систем, и мы всегда пытаемся сделать так, чтобы с РОСой это было удобно.
Правда если вариант с двумя системами («для игр и реальной жизни») прост и очевиден, то если держать на своем компьютере в порыве энтузиазма или по работе несколько линуксов, возникали юзабилити проблемы, из-за ответственности основной системы, поставляющей загрузчик, за загрузку всей остальной семейки:
- При обновлении ядра в каждом из этих линуксов нужно перегружаться в главную систему и запускать процесс обновления меню, чтобы подхватились новые ядра «дополнительных» систем. Причем процесс сканирования систем по разделам выполняется далеко не мгновенно и автоматизировать его при каждой загрузке было бы неправильно.
БардакМучительный беспорядок! - Пунктов меню становилось слишком много, ибо на каждый найденный линукс добавляется два пункта загрузки («Загрузка по умолчанию» и «Дополнительные опции»). И хотя одноуровневое меню при небольшом числе пунктов эргономичней вложенного, то начиная с четырех систем пунктов становилось больше классической формулы «5±2»… и тут бы уже хотелось иерархичности.
Соответственно, мы неоднократно получали пожелания — нельзя ли оставить дополнительные системы[8] в своих разделах, вместе с собственными загрузчиками и меню загрузки (тогда внутри своих разделов они бы обновлялись своими силами), а из главного меню загрузки GRUB-а делать только ссылки на эти меню?
Наконец-то мы сделали и это[9], и теперь РОСА отлично подходит[10] на роль старшей жены в гареме сестры в семье, которая заботится о порядке и надежной загрузке остальных.


На пути к решению
Предположим, что у нас уже есть возможность установки загрузчика в раздел, и представим себе, как будет выглядеть для пользователя настройка основного загрузчика. Для начала ему придётся вручную создать пункт загрузочного меню, который будет ссылаться на целевой раздел, что уже достаточно проблематично для пользователя, не слишком знакомого со структурой grub-меню и механизмами загрузки. Но будем считать, что пункт успешно добавлен и корректно работает. Что увидит пользователь после очередного обновления? В списке окажутся сразу три пункта, относящиеся к этой вторичной системе: прямая загрузка с использованием последней версии ядра, подменю с перечислением всех версий ядер, и, наконец, тот самый вручную добавленный пункт для перенаправления на загрузчик из раздела. Немножко избыточно, как вы считаете?
Что же мы можем здесь улучшить? На самом деле, пользователю совершенно необязательно передавать управление на загрузчик. Grub прекрасно умеет загружать свои конфигурационные файлы из произвольных мест. То есть если пользователя устраивает вышеописанная схема, то с нашей стороны и не потребуется ничего делать. Просто в том самом вручную созданном пункте надо будет вместо команды chainloader, передающей управление другому загрузчику, вписать команду configfile с путём к целевому grub.cfg.
И всё же избыточность раздражает. Да, в грабе[11] есть возможность отключить генерацию дополнительных пунктов меню для вторичных систем, но тонкая настройка отсутствует напрочь: либо всё, либо ничего. Так что если установлено более двух систем, то прописывать вручную придётся их все (кроме основной, разумеется). Ну и, конечно, ручное создание всех этих пунктов меню не очень-то соответствует нашим представлениям о user-friendly.
Мы решили решить обе проблемы одним ударом. В Grub2 была добавлена новая опция GRUB_OS_PROBER_LINKED, при включении которой все вторичные системы добавляются в меню не как обычно (один пункт для загрузки последнего ядра плюс подменю «Advanced options» со списком ядер), а в виде одного пункта-ссылки, перенаправляющего пользователя прямо на целевой конфиг-файл, как если бы он был обычным подменю.
И при использовании новой опции, загрузочное меню изменится, как показано на картинках выше.
Хочу, хочу!
Сейчас нововведение проходит последние стадии тестирования и проверки, и скоро обновлённые пакеты будут доступны в репозиториях. Начиная с релиза R5 GNOME, который выйдет на днях, все это будет по умолчанию в новых образах.
Чтобы воспользоваться новой возможностью на уже установленных системах, нужно будет прописать в файле /etc/default/grub строчку:
GRUB_OS_PROBER_LINKED=true
и перегенеровать загрузочное меню командой update-grub2. Для установки же системы с нуля мы добавили соответствующую галочку в расширенные настройки инсталлятора:

Чтобы вернуть меню к прежнему виду, удалите строчку с GRUB_OS_PROBER_LINKED или задайте этому параметру значение false и снова вызовите update-grub2.
Также в будущем мы планируем добавить поддержку этой опции в графические инструменты настройки загрузчика, чтобы не было необходимости править файлы вручную.
Что еще?
К решению этой задачи мы перешли получив множество пожеланий пользователей по поводу «установки загрузчика в раздел». Несмотря на то, что технически Grub2 поддерживает такой режим, он работает не для всех файловых систем, является крайне ненадёжным, и сами разработчики настоятельно рекомендуют его не применять, поэтому к идее добавления такой опции мы всегда относились весьма скептически. Мы предпочли подойти с другой стороны: понять, для чего вообще требуется установка загрузчика в раздел, и предложить альтернативные пути решения этих задач. Из отзывов пользователей мы смогли выудить следующие сценарии:
- Основным загрузчиком является не grub, а что-то другое, с конфигами граба работать не умеющее. Пользователь хочет поставить Росу, но оставить свой загрузчик. Тогда установка Росовского граба в раздел позволила бы добавить ссылку на него в основной загрузчик, так что при выборе соответствующего пункта управление просто передавалось бы в первый (загрузочный) сектор раздела, и на экране появлялось бы меню Росы.
- Эта задача пока остаётся нерешённой, но поскольку подавляющее большинство Linux-систем уже перешло на grub2, актуальность такого сценария невелика.
- Похожий, но несколько отличающийся вариант: пользователь просто хочет сохранить свой текущий загрузчик (может быть, тоже grub, но от другой системы), а установщик Росы всегда принудительно устанавливает свой вариант граба, перезатирая то, что было. Опция установки в раздел была бы в этом случае просто обходным путём для сохранения имеющегося загрузчика.
- Эту проблему мы решили более логично, просто добавив в инсталлятор возможность отказа от установки загрузчика. При этом локальный grub.cfg целевой системы продолжает генерироваться и обновляться, так что обновление основного загрузочного меню будет происходить корректно.
- Каждый раз при установке нового ядра в одной из вторичных систем пользователь вынужден перезагружаться в основную систему и вручную обновлять загрузочное меню, чтобы туда добавились новые ядра. Если бы была возможность установки граба в раздел, достаточно было бы однократно добавить в основное меню ссылку на него, и про необходимость ручного обновления можно забыть: локальный grub.cfg перегенерируется автоматически, так что при передаче управления в этот вторичный граб пользователю показывался бы сразу актуальный список ядер.
Решению вот этой-то задачи и посвящена данная статья.
|
-
РОСе нужен ты и твой ноутбук! Тестируем Secureboot
РОСЕ нужена твоя одежда и мотоцикл ты и твой ноутбук!
Особенно если на нем есть secureboot!
Попробуйте хотя бы загрузить в Live-режиме и с включенным secureboot-ом какой-нибудь из этих образов ROSA Fresh R5 (в зависимости от предпочтения рабочего стола)
Мы так долго проходили разную бюрократию, чтобы подписать загрузчик... только сегодня они подписали, и мы хотим успеть добавить эту фичу в R5!
Да, у нас большая база оборудования, больше сотни ноутов, куча видеокарт, но секьюребутных ноутов там мало, можно пересчитать по пальцам. Одной руки.
Помоги нам проверить загрузку, онегай!
Просто скачай образ, по ссылке выше, запиши его на флешку, и загрузись в лайв-режиме. Ставить не обязательно, никто и ничто не пострадает!

Ну а может и поставить — это собственно наверно уже релизные образы, в любом случае, даже если будут обновления образов, если встанет — обновления придут.
Шаринг и прочий ретвитинг особенно привествуется, жалобы пишите в любом удобном виде, комментами, багами в багзиллу, можно напрямую почтой директору по технологиям.
-
Загрузка и установка РОСЫ со своего же HDD
Устанавливать РОСУ можно множеством различных способов — в частности, c ISO-образа, расположенного на вашем жестком диске. Однако описанный в нашей вики способ подразумевает также наличие на вашей машине полноценно работающей ОС, в которой надо произвести некоторые подготовительные действия перед установкой. Однако может случиться, что такой системы на машине нет, равно как нет возможности загрузиться с внешнего устройства. Именно в такой ситуации оказался недавно наш коллега Сергей Соколов, и ниже мы приводим его рассказ о том, как он из этой ситуации выпутался.

Угораздило меня установить разработческую версию Fresh R4 себе на рабочий ноут. Прихожу утречком пораньше на работу, ставлю кучу обновлений и перезагружаюсь. А в этот момент в репозиториях, оказывается, как раз шел процесс обновления systemd и еще кучи всего системного. Короче, система не загружается, а вываливается в консоль dracut.
Так и эдак потыкался, никак система не поднимается. В общем, нужно переустанавливать. Флешки нет, CD/DVD привода нет, в офисе тоже никого нет, чтобы записать установочную флешку. Ну или представьте ситуацию, что система умерла где-нибудь в отпуске, а ноут вот прямо сейчас очень нужен.
Решил я малость поэкспериментировать с загрузкой с ISO-образа, расположенного на моем SSD/HDD носителе, да еще и на том самом, на который будет устанавливаться система.
# fdisk -l /dev/sda Disk /dev/sda: 480.1 GB, 480103981056 bytes, 937703088 sectors Units = sectors of 1 * 512 = 512 bytes Sector size (logical/physical): 512 bytes / 512 bytes I/O size (minimum/optimal): 512 bytes / 512 bytes Disk identifier: 0x00000000 Устр-во Загр Начало Конец Блоки Id Система /dev/sda1 2048 33556479 16777216 82 Linux своп / Solaris /dev/sda2 33556480 96471039 31457280 83 Linux /dev/sda3 96471040 937703087 420616024 5 Расширенный /dev/sda5 96473088 937703087 420615000 83 Linux
В общем-то, тут
- /dev/sda1 — своп раздел который у меня когда-то был, но сейчас просто отключен,
- /dev/sda2 — мой рут,
- /dev/sda5 — /home
От системы у меня в наличии только initrd и вываливается dracut
Вот его-то оказалось вполне достаточно:
mkdir /mnt mount /dev/sda2 /mnt mount -o bind /dev /mnt/dev mount -o bind /dev/pts /mnt/dev/pts mount -o bind /proc /mnt/proc mount -o bind /sys /mnt/sys mount /dev/sda5 /mnt/home chroot /mnt dd if=/home/path/to/ROSA.FRESH.KDE.R3.x86_64.iso of=/dev/sda1 bs=8M touch /boot/resque.iso vi /boot/grub2/grub.cfg
В конфигурационном файле grub находим строку содержащую rescue.iso и приводим эту часть файла к следующему виду:
### BEGIN /etc/grub.d/43_resque ###
if [ -f /boot/resque.iso -o -f /boot/sgb.iso ]; then
submenu 'Repair tools' {
if [ -f /boot/resque.iso ]; then
menuentry "Boot rescue CD" {
linux (hd0,1)/isolinux/vmlinuz0 boot=live iso_filename=/dev/sda1 root=live:/dev/sda1 rootfstype=auto ro rd.live.image rhgb splash=silent logo.nologo rd.luks=0 rd.md=0 rd.dm=0
initrd (hd0,1)/isolinux/initrd0.img
}
fi
Синкаем файловую систему командой sync и перезагружаемся. Теперь у нас есть recovery раздел, с которого без проблем устанавливается система. Главное здесь — не запускать форматирование раздела sda1 при установке системы.
Кстати, мы внутри неоднократно обсуждали, нужен ли при загрузке опциональный режим «восстановления через переинсталляцию», а именно:
- В инсталляторе предложить пользователю сохранить на /boot (если он создан) или /root- разделе собственно сам ISOшник, в виде файла installer.iso, с которого проходит инсталляция.
- Да, в /boot его положить лучше, ибо тогда можно будет переинсталлировать и полностью убитые /root-разделы, но это отдельный UX-вопрос, как предложить это проще, не перегружая и так непростой инсталлятор. Пока можно просто предложить такую опцию, интерфейсно аналогично как в конце инсталляции предлагается выбрать swap-файл, если swap-раздела не найдено — т.е. еще один вопрос в конце инсталляции.
- В GRUB-меню, в раздел Troubleshooting добавить и пункт «Переинсталляция», которный собственно и даст возможность переинсталлировать базовую систему (для начала без специальных типа сохранения /etc/passwd, и прочего) — т.е. опция скорее для не очень простых пользователей, хотя, если это ноутбук, который использует один человек, то, т.к. переформатирования /home не будет, то средней вменяемости пользователь уже сможет себе восстановить систему практически без приседаний.
Вопрос, интересно ли это нашим пользователям, иметь возможность держать полтора гига на винте, под возможность быстрой базовой переинсталляции?
Идея «Troubleshooting-восстановление через переинсталляцию»:
|
-
Urpmi - автоматическое добавление источников при установке пакетов по сети
ABF предоставляет удобную возможность давать пользователям экспериментальные сборки пакетов для тестов, не публикуя их в какие-либо репозитории. Достаточно сделать на основе сборочного задания контейнер - полноценный репозиторий, содержащий только пакеты из данного задания. Пользователи могут добавлять этот контейнер как источник и устанавливать из него пакеты.
Однако контейнеры - вещь временная, используемая для тестирования пакетов перед их отправкой в репозиторий (или на свалку истории). Более того, контейнеры на ABF автоматически уничтожаются через два месяца после создания. Так что добавление контейнера как постоянного источника вряд ли разумно - нужен он обычно только один раз, а после только засоряет систему.
Если в контейнере только один пакет, то можно передать urpmi прямую ссылку на этот пакет. Однако если в контейнере несколько пакетов, зависящих друг от друга, то придется добавлять источник, ставить пакет, а потом (рано или поздно) этот источник удалять. Многовато действий для ленивых тестировщиков и разработчиков! Неудивительно, что не раз поступали предложения сделать urpmi немного умнее и автоматически пробовать добавлять источник, если запрашивается установка пакета по сети, а после завершения установки этот источник автоматически удалять.
Например, допустим мы хотим установить пакет apache-mpm-prefork из сборки https://abf.io/build_lists/2290444. С предыдущей версией urpmi, попытка передать URL пакета напрямую успеха бы не принесла:
[root@r4null64 ~]# urpmi http://abf-downloads.rosalinux.ru/rosa2014.1/container/2290445/x86_64/main/release/apache-mpm-prefork-2.4.10-2-rosa2014.1.x86_64.rpm Не удаётся установить запрошенный пакет: apache-mpm-prefork-2.4.10-2-rosa2014.1.x86_64 (из-за неудовлетворённости apache-base[== 2.4.10-2]) Продолжить установку? (Y/n)
Понятное дело, недостающий apache-base-2.4.10-2 находится в том же контейнере.
С новым urpmi эта команда отрабатывает "на ура":
urpmi http://abf-downloads.rosalinux.ru/rosa2014.1/container/2290445/x86_64/main/release/apache-mpm-prefork-2.4.10-2-rosa2014.1.x86_64.rpm
добавляется источник «medium_for_apache-mpm-prefork-2.4.10-2-rosa2014.1.x86_64.rpm»
http://abf-downloads.rosalinux.ru/rosa2014.1/container/2290445/x86_64/main/release/media_info/20141009-184429-synthesis.hdlist.cz
http://abf-downloads.rosalinux.ru/rosa2014.1/container/2290445/x86_64/main/release/media_info/20141009-184429-info.xml.lzma
http://abf-downloads.rosalinux.ru/rosa2014.1/container/2290445/x86_64/main/release/media_info/20141009-184429-files.xml.lzma
http://abf-downloads.rosalinux.ru/rosa2014.1/container/2290445/x86_64/main/release/media_info/20141009-184429-changelog.xml.lzma
Для удовлетворения зависимостей будут установлены следующие пакеты:
(только проверка, без установки)
Пакет Версия Релиз Dist DEpoch Платформа
(источник «medium_for_apache-mpm-prefork-2.4.10-2-rosa2014.1.x86_64.rpm»)
apache-base 2.4.10 2 rosa 2014.1 x86_64
apache-mod_actions 2.4.10 2 rosa 2014.1 x86_64
apache-mod_alias 2.4.10 2 rosa 2014.1 x86_64
< ... список пакетов для установки ... >
apache-mod_usertrack 2.4.10 2 rosa 2014.1 x86_64
apache-mod_version 2.4.10 2 rosa 2014.1 x86_64
apache-mod_vhost_alias 2.4.10 2 rosa 2014.1 x86_64
apache-modules 2.4.10 2 rosa 2014.1 x86_64
(командная строка)
apache-mpm-prefork 2.4.10 2 rosa 2014.1 x86_64
Будет использовано 8.1КБ дополнительного дискового пространства.
Будет загружено 887КБ пакетов.
Установить 38 пакетов? (Y/n) Y
< ... журнал установки вырезан ... >
удаляется источник «medium_for_apache-mpm-prefork-2.4.10-2-rosa2014.1.x86_64.rpm»
Как мы видим, перед установкой пакета urpmi добавил источник с названием medium_for_apache-mpm-prefork-2.4.10-2-rosa2014.1.x86_64.rpm, а после установки удалил его. Даже если попытка установки завершится неудачно (по причине конфликтов, отсутсвия зависимостей, либо если вы просто ответите "нет" на предложение urpmi поставить необходимые пакеты), то источник все равно будет удален. Однако если вы прервете выполнение urpmi в процессе установки пакета (например, нажав Ctrl-C), то источник останется у вас в системе.
URL источника определяется очень просто - из URL, переданного в качестве аргумента urpmi, Отбрасывается имя пакета. Если источник по заданной ссылке добавить не удастся, то будет выведено соответствующее сообщение, однако установка запрошенного пакета будет продолжена. Автоматическое добавление источников можно полностью отключить в командной строке с помощью опции --no-auto-media, либо выставив глобальную опцию no-auto-media в файле /etc/urpmi/urpmi.cfg.
-
Автоматическое обновление метаданных в urpmi
Мэйнтейнеры, имеющие дело с разработческими версиями Росы, часто сталкиваются с ситуацией, когда urpmi не может обновить тот или иной пакет по той причине, что в репозиториях уже собрана более новая версия пакета, а той, что указана в метаданных, имеющихся у urpmi, уже не существует. В таких ситуациях приходится сначала запускать urpmi.update и снова пробовать установить нужный пакет. Конечно, можно просто всегда запускать urpmi --auto-update, но работа этой команды может затянуться, а обновить конкретный пакет, как водится, нужно срочно.
Хорошая новость — теперь (в ветке rosa2014.1, которая превратится в ROSA Desktop Fresh R4) urpmi сам в состоянии обновить метаданные и перезапуститься в случае, если что-то пошло не так с закачкой файлов и есть подозрение, что обновление метаданных поможет решить эту проблему. Такое поведение является теперь поведением по умолчанию; отключить его можно с помощью опции «--no-restart». Кроме того, можно заставить urpmi обновлять метаданные не сразу при обнаружении проблемы, а после некоторого таймаута — соответствующее время ожидания можно задать с помощью опции «--download-timeout». Последняя особенно актуальна для ABF, где сборки пакетов иногда завершаются неудачно из-за того, что старая версия какого-то пакета из репозиториев уже удалилась, а метаданные для новой еще не сгенерировались. Когда ABF переедет на новый urpmi, таких проблем должно стать меньше.
Новая возможность urpmi актуальна прежде всего для разработчиков. Большинство обычных пользователей с подобными проблемами сталкиваются редко — во всяком случае, если они не отключали себе автоматические уведомления о доступных обновления, так как для таких уведомлений urpmi.update выполняется автоматически на регулярной основе, а обновления пакетов для уже выпущенных систем происходят реже, чем для разработческих версий. Впрочем, пользователи тоже бывают разные, и кто-то наверняка заметит, что количество ручных действий при установке пакетов теперь несколько сократилось.
- Наши новые разработки
-
Screenpen — магия пера или эффективная свобода преподавания со стилусом
Лекции и семинары, конференции и бизнес-тренинги — называться это может по-разному, но суть в любом случае одна: автор-лектор-тренер, пытается передать аудитории смысл голосом, жестами и, самом важное, что-то показывая — формулы ли это на доске, ватман с картинками в руках, или стеклянные колбы с живыми опытами.
Ранее, кроме живых демонстраций, вариантов визуализации почти не было — только унылая доска в меловых разводах. Затем с Запада пришли флипчарты и «смерть от PowerPoint-а», и в целом, сейчас актуален спор между любителями слайдов и «старой школой доски».
Плюсы слайдов и других заранее заготовленных материалов, не важно, скучные ли это рожденные из документов слайдоменты, веселые картинки или «адов матан» — это большая читаемость текста, формул, диаграмм и визуальная эффективность, даже если там будут только «картинки с котиками». Минусы — линейность и детерминированность, очень трудно отойти от накатанного сценария с заготовленным набором слайдов. Это еще более-менее терпимо в коротком докладе на конференции, но неудобно для семинара-тренинга.

Этого недостатка лишены мастера флипчартов и модных маркерных досок — они могут быстро импровизировать, набросать поясняющую диаграмму или простую иллюстрацию, написать нужную формулу и анимировать зависимости и переходы… с другой стороны — качество этих рисунков, текста и формул — ужасное, и если писать только на доске, без заготовок, то это чистый проигрыш даже простым «слайдоментам».
Что делать? Ну, теоретически, можно совмещать — показывать и заготовленные слайды, и при этом импровизировать и дорисовывать пропущенное на доске. Тут возникает куча проблем с переключением, как внимания аудитории, так и инструментов лектора, не говоря уже о необходимости дополнительной «недвижимости» досок. Ведь проектор уже стал обязательным оборудованием для лекториев, портативный проектор и ноут легко взять с собой на какой-нибудь выездной тренинг, где, проецируя на стену можно обойтись без специального экрана. А если у слушателей есть лептопы или планшеты, то можно просто транслировать им экран.
И это не говоря уже о том, что то, что транслируется на экран, можно эффективно и качественно записать на видео, грамотно смонтировав, или показывать дистанционно.
Так что же делать? Тут на помощь приходят стилусные ноутбуки, т.е. лептопы, в которых можно рисовать пером напрямую по экрану. Сейчас мощный тренд тотальной сенсоризации дисплеев, но даже если ваш ноутбук не такой, то можно специально для выступлений купить простой pentablet с ebay — например, б.у. HP 2730p, которые когда-то стоили $4000, сейчас можно найти на ebay за $50 и дешевле (подробней см. в разделе #Эффективный ebay-инг). Это позволительно даже небогатому преподавателю. Ну, а если бюджет позволяет, можно поставить в класс тачскрин-моноблок типа HP TouchSmart 610, на который и удобно смотреть преподавателю, не отворачиваясь от аудитории к большому экрану, и рисовать пояснение даже пальцем, поверх слайдов с формулами и прочим.

Итак, поговорим, о том какой же open-source софт позволит достичь синергии между заготовленными материалами и импровизацией на месте, позволит вам, если и не превратится в звезду TED, то по крайней мере, эффективно объяснять то, что вы знаете.
Во-первых, есть отдельный класс программ-журналов, заменяющих флипчарты — journal, jarnal, xournal и др. У них есть свои плюсы и минусы, местами даже уникальные возможности. В любом случае, освоив хотя бы одну из них, вы уже не будете нуждаться в досках и флипчартах.
Собственно на эту тему, у нас был короткий доклад на конференции OSEDUCONF-2014, где я показал живьем работу с «электронными маркерными досками», и если кратко — лучшее из них, это Xournal, который конечно же есть у нас в репозиториях.
Кстати, спрошу, надо ли писать обзор докладов с конференции OSEDUCONF-2014? А то видео было нами опубликовано оперативно, за неделю, но без обзорного доклада похоже мало кто смотрел записи с этой конференции.
Но кроме досок и слайдов, самой лучшей визуализацией ведь были «живые опыты», а в современных условиях на лептопах это будут живые демонстрации работы с софтом и сервисами, показ видеофрагментов, управление внешними устройствами, — и возникает очевидный вопрос: нельзя ли совместить «магию пера» с «живой демонстрацией»?
В мире Windows давно была маленькая суперпрограмма ZoomIt, написанная гениальным Марком Руссиновичем[12], с минималистичным оптимизированным интерфейсом. С ней можно было просто и удобно в любой момент рисовать поверх всего на экране разными цветами и увеличивать любой его фрагмент.
Но ZoomIT, хоть и бесплатен, но закрыт и работает только для Windows, а в мире open source и Linux с этим было сложно. Аналогичные программы вроде бы были, но сожалению, совершенно unusable.
- Ardesia — перегруженная и глючная;
- GromIT — неудобный, глючный, и заброшенный в 2004;
- GromIT-MPX — неудачная попытка его реанимировать;
… ну ничего хоть близко лежащего с ZoomIt.
Good news, everyone!
Наша команда реализовала[13] ScreenPen — аналог ZoomIT, и сейчас мы опишем его возможности.
Электронный карандаш-маркер для рисования «поверх экрана» в Linux.

При разработке ориентировались на популярную Windows-утилиту ZoomIt.
- Реализует ее функциональность (+много еще)
- Наследует ее клавиатурный интерфейс — Windows-пользователям не придеться переучиваться.
В ROSA GNOME идет из коробки, надо лишь включить («Параметры → Дополнительные параметры → Расширения SHELL») расширение «ScreenPen Launch»
И тогда у вас появляется иконка с лупой[14].
В KDE, LXDE или других средах надо самостоятельно настроить хоткей для вызова «screenpen».
Для KDE это можно сделать в Настройках рабочего стола (Комбинации клавиш и росчерки -> Специальные действия -> Изменить -> Новый -> Глобальная комбинация клавиш -> Команда или адрес).

И тогда, по хоткею «CTRL-1» вы активируете ScreenPen, и далее можете:
- Увеличивать рабочий стол, хоть до одного пикселя, с помощью колесика мыши или скроллинга тачпада, и перемещаться с этой лупой по рабочему столу.
- Начать рисовать (при этом положение активной фиксируется, хотя по прежнему, ее можно зумить). Просто рисуйте стилусом, пальцем по понимающему тачскрину, или, на худой конец, зажав левую клавишу мыши.
- Менять толщину карандаша-фломастера клавишами 1,2,…9
- Переключать разные цвета, мы выбрали самые простые и надежные:
R G B C M Y W
C этими цветами можно рисовать и по белому, и по черному экрану, и даже подобрать что-то контрастное поверх странного интерфейса, картинки или видео. И в любом случае, отобразить палитру ваших эмоций, разделив что-то хорошее от плохого, а опасное от ценного («красный-голубой)».
Есть также отдельно режимы, также включаемые одной клавишей
- A
- По умолчанию — режим обычного, свободного рисования.
- Z
- Включает режим рисования линий (например нужны стрелки, или просто ровные линии).
- X
- Режим рисования прямоугольников.
Как обычно, самое главное для пользователя — как выход. Выход по клавишам «ESC» и «TAB». С одной стороны «ESC» — привычней, но ошибочное нажатие на эту клавишу выбразывает из режима презентации во всех программах (Impress, Evince, Okular…) поэтому рекомендуем приучиться использовать только «TAB».
- Исходный код
- https://abf.io/uxteam/ScreenPen
Установка
- В графическом окружении
- В dnfdragora найдите пакет screenpen и установите его.
- Через терминал
- В терминале наберите следующую команду: sudo dnf in screenpen
Не можете найти нужный пакет? Проверьте, правильно ли подключены репозитории.
Если у вас GNOME, то расширение-интеграция должна быть установлена из коробки, но если вдруг что-то случилось, то нужно установить пакет «gnome-shell-extensions-screenpen».
Бонусы!
Эффективный ebay-инг


Это не шутка, я скупил несколько десятков таких лептопов, именно по таким ценам, на которых мы неплохо отладили ROSA Fresh, особенно в части WiFi-карт и тачскринов.
Как пример — это HP 2730p, Thinkpad X61 Tablet, сейчас уже пошел поток HP 2740p.
Дело в том, что это корпоративно-бизнес модели ноутбуков, которых собственно эти корпорации и покупают, на вполне определенный срок — 2-3 года, после чего запланирована плановая утилизация — т.е. они платят специальным компаниям за утилизацию, а они, уничтожив жесткие диски, продают их пачками на ebay. Да, в них нет жестких дисков — и это классно, ибо самое время проапгрейдить их на SSD, которые можно купить у нас, или же опять поискать на ebay. SSD — прекрасный способ вдохнуть новую жизнь даже в старый ноутбук, ибо для классической активности — коммуникация-броузинг-видео-офис, вполне хватит на долгие годы, условно говоря поколения «Core Duo», если убрать главный bottlneck — жесткий диск, который часто еще в бизнес-модели ставили замученной версии — 1.8" 4200rpm, какое-то наноиздевательство над идеей жесткого диска. А вот SSD все равно, какого формата, 1.8" работает не хуже 2.5" или 3.5". Часто совсем за копейки отдают ноутбуки с залоченным BIOSом — нет, отключением батарейки это не решить, но есть софтовые хаки, как перепрошить биос и снять блокировку (я снял у нескольких), или можно выпросить решение у техподдержки HP.
Вообще, покупки на ebay — увлекательный мужской шоппинг, напоминающий рыбалку или охоту, с элементами покера… Что же в первую очередь нужно, для эффективного ебеинга?
Во-первых, зарегистрироваться на Paypal (который на самом деле тот же ебай), привязать свою дебетовую карту, подтвердить-авторизоваться и все такое.
Во-вторых, это в первую очередь американская барахолка, и продающие там американцы, слабо представляют, что творится за пределами глобуса Америки («там живут драконы, люди с песьими головами…») и международную доставку отрицают. Поэтому, вам нужен американский адрес, удаленный почтовый ящик с управлением через интернет. Один из самых первых таких сервисов, которым пользуюсь я — Shipito, но сейчас есть порядка десятка более дешевых альтернатив. Специфика операций стандартная — учет и хранение входящих посылок, фотографирование содержимого, возможна консолидация кучи мелочи в единую посылку, которую гораздо дешевле можно переслать к себе разными службами. Я кстати, предпочитаю Почту России — это обычно дешевле, а что насчет скорости — то даже приятно, получить посылку спустя несколько месяцев, когда уже забыл что там, и зачем… Получается такая посылка самому себе от себя в прошлом («сам себя не поздравишь, никто не поздравит»).
В-третьих, несмотря на радость адреналина аукционной охоты, мужской подход должен быть другой — холодный, выдержанный и эффективный. Сидеть в засаде и бить одним выстрелом. В глаз. Т.е. надо стать «снайпером». Так зовут тех, кто «охотится» за лотами с помощью робота. Поставьте себе многоплатформенный JBidWatcher[15]. После чего, вы больше не нервничаете, не тратите адреналин, ожидая конца аукциона, не вбиваете напрегонки все большие ставки, следя за меняющимися цифрам аукциона и зачастую, «разгоняясь» и переплачивая. Теперь вы просто неторопливо рыбачите в ebay-е, отбирая потенциально интересные лоты, и заранее програмируя робота-jbidwatcher, купить «их по цене не более чем». И спокойно ложитесь спать, или идете на работу. А снайпер-jbidwatcher, остается бдить, чтобы за мгновения до конца аукциона, внезапно выставляет вашу ставку, и если цена еще не была перегрета выше до этого «обычными лохами», вы покупаете лот, причем, если кто не в курсе правил ebay — по справедливой цене ставки, которую вы перебили + минимальный порог. Обычно, помешать вам может только два случая — вы реально недооценили лот, либо вам попался другой снайпер… Просыпаясь, или возвращаясь с работы — «собираете улов», переправляете в свой почтовый консолидатор и дальше в Россию.
Да, ожидаемые законы могут подкосить эту рыбалку, но в любом случае, возвращаясь к теме пен-таблет-буков, в 150€, их по-прежнему можно засунуть несколько штук.
Как круто выступать с планшетным лептопом
Некоторые отказываются от выступления с планшетным лептопом, ибо насмотревшись выступлений с TED, хотят ходить вдоль сцены, махать руками, ну и вообще, театрализировать по максимуму… и считается, что кроме тупого кликера слайдов, тут ничего не поможет.
Решение есть — наверно все уже устали читать, так что понятная картинка.

И ключевое слово-ccылка — Connect-A-Desk.
Я перепробовал кучу аналогов, включая самодельное, это наверно оптимум.
Дистанционное преподавание
Итак воспользовавшись предыдущими советами, вы стали мастером, как говорится «Ballroom & Conference-room» выступлений, т.е. и развлекать большую легкомысленную аудиторию на конференциях, так и индивидуально убеждать серьезных бизнес-партнеров в переговорке.
Но. Перед преподавателями стоит новый челлендж — дистанционное преподавание. Через интернет, живьем, с обратной связью (иначе проблем нет — надо просто записать видеолекции[16]).
Тут обычно пасется куча странных вебинарных сервисов, дорогих, перегруженных, «вендорлочных», из которых трудно забрать свой контент… Иногда начинают что-то изобретать используя какой-нибудь скайп или гугл-хангаут, упираясь в лимиты видеоконференций.

На самом деле, важно понять основной принцип дистанционного преподавания[17].
- Самая важная информация от преподавателя — визуальная тематическая информация (экран, слайды, живая демонстрация, рисование поверх…) + звук.
- Обратная связь от учеников должна поступать асинхронно, не прерывая преподавателя и друг-друга — для этого текстовая коммуникация подходит идеально. Да, текст набирать сложней, чем читать реп, но тут оправданная ассиметрия — преподаватель использует «широкополосный аудиоканал» — а замечания навстречу обойдутся обычным текстом.
- При этом лаг видеопотока может быть несколько секунд, но не больше.
- Текст обратно может и должен доходить мгновенно.
Как я уже говорил, платные сервисы отстой и перегружены, Google Hangout On Air (с потенциально неограниченной аудиторией), имеет несовместимые жизнью лаги от 40 секунд и больше, Skype ограничен (а под Linux и вовсе нет видеоконференций)…
Предлагаю решение, простое, независящее смертельно от производителя, и из серии «сделай сам за пять минут из готовых блоков».

Идея элементарна — с помощью пары HTML-тегов, сверстать страничку, в которой есть
- встраивание какого-либо сервиса видеотрансляции. Совершенно неважно какого — они открываются и закрываются. На картинке например была ссылка на http://yatv.ru, который недавно закрылся загоняя старых пользователей в платную платформу — но полно совершенно таких же стандартных — twitch.tv и прочих, получающих видеопоток по RTMP, и раздающих его всем, без ограничения. Для продвинутых — полно рецептов, как быстро, с помощью nginx+rtmp-плагин, поднять сервис видеотрансляции у себя.
- встраивание Etherpad-блокнота, для моментального редактирования, в этом блокноте уже есть чат. Это open-source, нежадный по ресурсам сервис, его можно развернуть у себя, но можно использовать любой из десятка открытых на его основе сервисов, например Titanpad.
Вот один из моих работающих примеров.
После этого, осталось собрать в нужное время нужную аудиторию на страничку, и запустить трансляцию скринкаста со звуком, с параллельной записью, одной командой, вызывающий швейцарский нож видеомонтажа и трансляции — ffmpeg.
ffmpeg -f x11grab -r 2 -s 1280x800 -i :0.0 -f alsa -i hw:0,0 -f flv -qmin 2 -qmax 4 -r 2 -vb 400K -ab 64K -ar 44100 -timeout 30 "rtmp://m2.d5.yatv.ru/ app=live/belonesox/p/e2e157035638a…"
- …
- PROFIT!
|
-
Скромный GUI для ROSA Freeze
Одним из новшеств осенних релизов РОСЫ был инструмент ROSA Freeze[18], позволяющий «заморозить» вашу систему так, что все (почти:)) сделанные в ходе работы изменения автоматически уничтожаются после перезагрузки. Инструмент в использовании очень прост, однако работает только в командной строке, что нередко отпугивает пользователей. А многие его просто не найдут. Для упрощения жизни, мы сделали простенький графический интерфейс, который может включать и выключать режим заморозки. Специальных названий для графического интерфейса мы придумывать не стали, просто ищите и устанавливайте пакет rosa-freeze-ui. В командной строке можно использовать имя покороче — urpmi rfreeze-ui. После чего ищите «ROSA Freeze» в меню либо запускайте команду rfreeze-ui из консоли.
Помимо кнопок Вкл./Выкл., через графический интерфейс можно задать и параметры заморозки — что использовать для хранения измененных версий файлов и какие директории не замораживать (обратите внимание, что заморозка /home и директорий, располагающихся не на корневом разделе, не поддерживается).

Надеемся, что наличие GUI сделает использование ROSA Freeze проще. Главное — не забывайте о включенном режиме заморозки и не удивляйтесь, если после перезагрузки машины пропадут все сделанные вами изменения. А если вдруг у вас неожиданно появятся сообщения о том, что на диске закончилось место, хотя его вроде бы должно быть предостаточно — проверьте, не включен ли у вас режим заморозки с использованием tmpfs для хранения измененных файлов.
Как водится, код проекта открыт и доступен на ABF, предложения/замечания/патчи — welcome.
-
ROSA Cloud Connector - упрощаем связь с облаками
Как вы наверняка знаете, время от времени В РОСЕ случаются наплывы студентов из НИУ ВШЭ. Многие студенты проходят у нас двухнедельную практику, в рамках которых выполняют небольшие задания по сборке пакетов и созданию вспомогательных утилит для этого процесса (временами даже вполне полезные).
Помимо практики, некоторые студенты выполняют для нас более сложные задачи в рамках дисциплины «Командный проект». Обычно эти задачи относятся к инфраструктурным проектам и пользователям их результаты напрямую не видны, но в этом году есть исключение — утилита, получившая название «ROSA Cloud Connector».

Программа делает ровно то, что отражено в ее названии — подключает вашу машину к различным облакам, а точнее — к облачным хранилищам. Подключиться можно только при условии, что хранилище вообще поддерживает Linux. Если есть «родной» клиент (например, в случае Dropbox), то он будет скачан установлен. Если клиента нет, но поддерживается WebDAV, то будет облачное хранилище будет подсоединено с использованием этого протокола и вы можете лицезреть соответствующие директории в Dolphin, Nautilus и прочих файловых менеджерах. Все, что от вас потребуется — это логин/пароль соответствующего сервиса. Не надо изучать инструкции по монтированию WebDAV или скачиванию клиентов — программа все сделает за вас.
Чтобы заполучить программу в свою систему, достаточно поставить пакет rosa-cloud-connector. Убедитесь при этом, что у вас установлены вс обновления (особенно относящиеся к Qt5, на котором написана утилита). Далее ищите в меню программу rosa-cloud, либо просто запустите ее из командной строки.

Список хранилищ с поддержкой Linux невелик, и более того, имеет тенденцию сокращаться — за время работы над программой успело «умереть» два сервиса. Впрочем, возможно о каких-то сервисах мы не знаем — тогда просто сообщите нам об этом. Программа в этом плане хорошо расширяемая, добавить поддержку нового сервиса в нее совсем несложно. Возможно, именно с помощью ROSA Cloud Connector другие пользователи узнают о существовании еще одного облачного хранилища, которое можно использовать в Linux.
Текущую версию ROSA Cloud Connector не стоит рассматривать как идеальную (в конце концов, для ее авторов — это первый опыт программирования под Linux). Однако если к ней появится интерес, то мы готовы ее дорабатывать и улучшать.
Как всегда, помощь советом приветствуется, помощь патчами — тем более. Исходный код доступен на ABF, можно смело форкать, экспериментировать и слать Pull request’ы.
|
- Фичи и багфиксы
- наши наработки и доработки рабочих столов и отдельных утилит, GNOME и KDE, все для юзабилити и надежности.
-
Откапываем забытый Tray — панель уведомлений снова видна в режиме обзора

Итак, сегодня у нас новый жанр — Slowpoke news! Расскажем о доработке, которую сделали еще в прошлом году, но никак не доходили руки ее описать, обосновав, почему это правильно.
Для этого, необходим исторический экскурс в эволюцию логики десктопных рабочих столов. Ведь цель интерфейса десктопной системы — дать пользователю возможность рулить множеством одновременно запущенных приложений, давай возможность переключаться между приложениями требующими активного внимания пользователя, и при этом, не сильно отвлекая пользователя держать его в курсе того, что потенциально может потребовать его внимания.
Сначала фокус был именно на активном взаимодействии со всеми приложениями — про это и оконная система, с возможностью быстро переключатся между окнами, и система рабочих столов. Для крутых пользователей, с мощным процессором в голове и прокачанной системой ввода-вывода, больше и не нужно. Не случайно среди крутых хакеров популярны каскадные оконные менеджеры, автоматически раскладывающие оконный пасьянс по нескольким мониторам и рабочим столам — все есть окно, фоновые процессы пишут логи в отдельных терминалах, все видно, по сути, это интерфейс аналогичный промышленным системам управления производствами — все датчики видны, все в пределах зрения.
Но. Для всех остальных 99.99…99% пользователей это слишком. Стало понятно, что надо дать возможность быстро переключатся между самыми активными приложениями — для этих приложений были рождены концепции панелей, или как в GNOME SHELL, переключения по миниатюрам окон в режиме обзора, плюс последовательное переключение по Alt-Tab. А кучу фоновых процессов-приложений надо куда-то деть, чтобы они могли не сильно отсвечивая, показывать свой статус, и пытаться привлечь внимание, если стало совсем невтерпежь. Это и разные мессенджеры, чатилки, почтооповещалки, звонилки-говорилки, музыкальные плееры, обновлялки софта, мониторинги питания и здоровья оборудования, и т.п. Для них потребовалось уметь представить себя компактной инфографической иконкой, отражающей состояние и необходимость реакции, и для них появился отдельный концепт — «tray», системный трей, он же «область уведомлений», он же «область статусов», … как только его не называли, иногда даже груба калькируя с английского, как «лоток» и «поддон».

И в этом «поддоне» продолжалась борьба приложений за внимание пользователя и жизненное пространство — продвинутый пользователь в Windows, где огромное количество фоновых приложений с tray-интерфейсом[19] забивали его подзавязку, и приходилось разруливать, кто допущен в видимую область всегда, кому разрешается помахать флажком уведомлений при необходимости, а кого надо вообще спрятать от греха подальше. Ну и добраться до конкретного трей-приложения, когда их несколько десятков, все они нарисованы микроиконками 16×16, и надо либо тупо смотреть на этот пазл, напоминающий старые пиксельные головоломки, либо подводить к каждому курсор, надеясь, что всплывающая подсказка поможет вспомнить, «кто все эти люди?».
В сети можно найти много совсем страшных картинок, но для примера я приложил tray со своего Windows-десктопа — видно, что совсем, совсем непросто рыться в этой куче.
При проектировании интерфейса GNOME SHELL, был сделан очередной подход решить эту проблему.
Там введено, условно говоря, два трея — верхний и нижний.
- Верхний
- растет с правого верхнего угла в верхней, классической GNOME-панели, там основные иконки статуса оборудования — зарядка-звук-клавиатурная раскладка и туда пускают некоторые другие приложения по специальному списку избранных. Можно редактировать этот список, можно ставить специальные расширения, чтобы пустить еще кого-то, например, мы по умолчанию в нашем GNOME устанавливаем Skype Integration, и при запущенном скайпе там всегда будет видно, есть ли там что читать, или нет. Собственно, для нелинукс-пользователей все это похоже на MacOS с menulet-ами, и да, Apple тоже бореться с их засильем, запрещая все лишнее, а народ пишет дополнения («Menu Extra Enabler», и т.п.), чтобы туда что-то засунуть.
- Нижний
- Он же «message bar», но наверно привычней для русского уха называть его «нижним треем». Там сидят все фоновые приложения. Им дали большие иконки 48×48[20], в них легко попасть и мышью, и пальцем на тачскрине. Единственное ограничение — их не видно, нижний трей скрыт от глаз пользователя.

Это все реализация GNOME-подхода, что пользователь — это не оператор АЭС, который должен следить и переключатся между сотней датчиков и приложений, а должен быть сфокусирован на своей основной задаче, и все лишнее не должно его отвлекать.
Не должно быть постоянно мигающих мессенджеров — «посмотри, кто написал привет, а то я так и буду мигать в углу, пока у тебя не случится эпилесия», «я обновляюсь показывают страшные рожи», «я проверяю диск и тоже что-то там анимирую». Нет, если что-то важное, например живое сообщение из мессенджера — покажи это на несколько секунд всплывающим с нижней кромки окна сообщением — если пользователь тут, он, без малейшего шевеления конечностями, чисто периферийным зрением это увидит и успеет прочитать, и если надо отреагирует. Нет — жди, когда он соблаговолит слазить в «поддон» и посмотреть, у кого что натикало.
Благородная цель, неплохая идея, дело за малым — чтобы можно было легко и интуитивно в этот поддон заглянуть.
И вот тут, не слава богу.
В нижний трей можно заглянуть:
- «По-смартфонному» — оттянув пальцами по экрану нижний край вверх. Да, понятно тач-пользователям, но увы, большинство даже лептопов без тачскрина, и даже если он есть, а работа идет по десктопному, с клавиатурой-тачпадом-мышью, перенос пальцев на экран — тяжелейшая операция, т.е. для десктопа это не вариант.
- «Пробить мышью дно» — надо доехать курсором до
днанижнего края экрана, и<начать рыть, продолжить ломится дальше — т.е. продолжить гладить тачпад, либо скоблить мышью по столу — просто доехать до конца и подождать — обычно не срабатывает. Возможно тут еще и глюки механизма, но даже, если бы он работал идеально — это не ОК, ибо догадаться о том, что с некоторой задержкой нижний край как-то реагирует — это дико нетривиально для обычного пользователя. Конечно, если пользователь уже столкнулся с Windows 8он в цирке не смеетсяон уже привык исследовать края экрана, но все-таки это не гуд. Особенно не гуд этот метод, для продвинутых пользователей, активных операторов, печатающих и не желающих, чтобы мышь и фокус внимания и ввода куда-то переключался. - Для таких пользователей, нужен хоткей, позволяющий на секунду заглянуть в поддон, не сбивая положение курсора, и рук на клавиатуре. И да, такой хоткей есть. «WIN-M». Неизвестный (для продвинутого Windows-пользователя это минимизация окна), неочевидный («Win-M?, Mmmm? WAT?»), и неудобный (одной рукой вслепую не нажать).
При том, что есть такая кнопка, которая известна всем пользователям, без которой в GNOME Shell вообще ничего не сделать, про которую твердят обучающие ролики при установке системы… Это WIN! Кнопка «WIN», про которую мы уже писали в Blog:Точка Росы/Хоткеи для Windows-свитчеров. Смело переходите на GNOME!, и Blog:Точка Росы/Кнопка WIN ваш лучший друг! Учим горячие клавиши в GNOME.
Именно она создана для того, чтобы вырвать пользователя из фокуса на текущем приложении и перевести в режим «Обзора», обзора всего, и именно в этом режиме изначально показывался нижний трей, он же message bar, что было совершенно логично. Но в районе 3.4 гнома они это выпилили (больше минимализма для бога минимализма!), и залили «подвал бетоном» — нижним треем стало абсолютно неудобно пользоваться.
Good news, everyone!
Мы починили это и вернули нижний трей в режим обзора.

И теперь, постфактум, спросим — а не зря ли?
|
- Update
- Похоже, все-таки это мы сделали зря — хотя голосование в среднем одобрительное, мы получали негативные отзывы об этой доработке (см. например [3]), а так как отключаемой (через расширения) эту функциональность реализовать нам пока не удалось, мы решили начиная с GNOME 3.12 отключить эту доработку. К тому же неутомимые гномеры вовсе решили в свежих версиях гнома отказаться от нижнего трея.
-
PDF-браузинг у нас в GNOME ОК
Вебтехнологии захватывают все, даже продукты превращаются в сервисы, а программы в странички в веб-браузере, что же говорить про обычное чтение — в эти же страницы упали газеты/журналы/книги, и если раньше чтение ассоциировалось с настольной лампой и теплым клетчатым пледом, неторопливым шелестом бумаги с последовательным чтением увесистого томика под беззвучное шевеление губами, то сейчас — с зомбированным взглядом в светящийся жидкокристаллический экран с шевелением уже не губами, а пальцами. Чтобы прыгать этим самым веб-браузером по ссылкам, и возвращаться обратно, позволяя пытливому разуму обходить бесконечное Дерево Знаний, то забуриваясь в глубину, то ускоряясь вниз, то выныривая вверх. Впрочем, граммарнаци отпинали бы сейчас меня не только за двойной призыв «веб-браузера» в предложении, но и за само слово, — ведь это же тавтология, это на гнилом западе webbrowser, а у нас просто «браузер», другого нет, и не будет…
На самом деле есть — есть еще и PDF-браузер. PDF до сих пор еще остается непревзойденным форматом, когда нужен читать хорошо сверстанный текст с изображениями, где формулы не выпрыгивают из строчек, изображения мягко обтекаются колонками текста с грамотно расставлеными переносами. Да, обычный худлит все равно в чем читать, но вот хорошо сверстанные учебники, с формулами и иллюстрациями, гиперссылками на определения и теоремы… — для этого нужен настоящий PDF-браузер — не просто читалка с прокруткой, и навигацией по страницам, но именно настоящий гипертекстовый подход — «перейти по ссылке, вернуться обратно», и чувствуя себя Тезеем с страховочной нитью, можно смело погружаться в лабиринты ссылок в гипертекстовых книгах.
В качестве примера подобной электронной книги, с формулами и гипертекстом, я, чисто для иллюстрации, нескромно порекомендую свой учебник.
И с этим в Linux-мире вроде все отлично — под KDE живет Okular, под GNOME — Evince, знакомый обычным пользователям скромно по должности «Просмотрщик документов» и с этим все хорошо.
А, на самом деле нет. В GNOME нехорошо.

В Evince задумана функциональность «Back», есть кнопка для этого на аскетическом интерфейсе, есть стандартный хоткей «ALT+←», но… оно не работает, тупо бросая на предыдущую страницу. Ужас, кошмар, нить Тезея порвалась, Ариадна его не дождется… придется ставить Okular.
Good news, everyone!
Мы починили это! Ну, на самом деле, даже не пришлось писать патч, мы нашли малоизвестный патч в соответствующем баге, и у нас в GNOME теперь все хорошо!
Через пару-тройку лет, с вероятностью 50%, возможно этот патч попадет во все дистрибутивы…, так что если кто читает это и строит какой-нибудь GNOME-дистрибутив — рекомендуем сделать это прямо сейчас, это один из таких мерзких кирпичиков, из-за которых многие считают, что на «планете GNOME» жизнь невозможна.
|
-
Закладки в Nautilus — теперь их делать удобней
Файлы… Старейшая и ключевая концепция операционных систем, до сих пор живущая даже на уровне пользовательского интерфейса.
Да, ранее пользователи были обязаны знать что-то о структурах файловой системы — DOS/Windows пользователи учились различать буквы системных и подключаемых дисков (эти магические «A:»-«C:»-«D:»…), Linux/Mac пользователи учили правоверному подходу с единым корнем «/», а продвинутые юзабилисты[21] утвержали, что концепция файла с полным путем, странными ограничениями на названия файлов («8+3», «ascii») переусложнена и совершенно избыточна для нормального пользователя.
И кстати, при реализации современных контентных вебсистем (вики-сайты, гуглдоксы и т.п.), как правило рассчитанных на самых простых пользователей, изначально пытались избавится от иерархической модели, через плоские структуры
- «имя файла-документа=название документа»,
- дополнительная неиерархическая классификация через «теги/метки/категории».
Однако истина где-то посередине — с одной стороны и файловые системы сделали шаг к пользователю — длинными именами в национальных алфавитах никого не удивишь, файловые навигаторы теперь стараются показать и метаинформацию, визуализировать превью содержания, и при этом быстро полнотектово искать, спасая пользователя от перебора кучи вложенных папок.
С другой — выяснилось, что иерархическая структура, несмотря на риски «закопать в папках важное» интуитивно понятна и удобна, а с появлением разных дропбоксов, стала возможно в и строить личные базы знаний и вести групповую работу, используя привычный файло-папочный интерфейс.
Все это отражает короткий файловый анекдот-однострочник: /home/stas/Хрень по работе/Гемор/Тупые клиенты/Неплательщики/о--евшие/Уважаемый Сергей Анатольевич.odt
Да, остается только проблема, когда «наведение порядка и структурирование файловой помойки» вступает в конфликт с «чтобы было под рукой в двух кликах», что обычно приводит к россыпи файлов на рабочем столе или домашней директории.
Эту и другие проблемы, решает такая очевидная интерфейсная метафора, как закладки, которую поддерживают все продвинутые файловые менеджеры. Все, обычному пользователю становится совершенно пофиг на то, какими слешами разделаются пути в файловых системах, единый ли у файловой системы корень, или надо париться про названия дисков, в Windows-е, Mac-е, KDE или GNOME — он всегда знает, что есть закладки на домашнюю папку, на самые простые личные категории («Загрузки», «Изображения», «Музыка»…) там все разложено, так как надо, а к наиболее часто используемым в данный момент папкам — будь то развлекательное видео на FTP-хранилище, или та самая «Хрень по работе» у него сделаны закладки, и эти папки доступны по одному клику в левой панели файлового навигатора.

И в идеале, эти закладки должны очень легко и удобно добавляться и убираться — увидел интересующие папки, выделил и добавил через контекстное меню, просто и очевидно.
Но. В GNOME SHELL, а точнее в Nautilus это не так.
Чтобы добавить закладку, надо либо быть продвинутым пользователем, и зайдя внутрь нужной папки вызвать клавиатурное заклинание «CTRL-D», либо, опять-таки, зайти внутрь папки, сильно пробежаться мышью сначала в правый верхний угол к незаметному значку настроек, и уже там найти опцию добавления в закладки.
Мучительно долго, и совершенно неочевидно, практически спрятано от обычного пользователя, ожидающего, что все разумно возможное с видимым в интерфейсе объектом можно сделать по контекстному меню.
Good news, everyone!
Теперь, а точнее уже несколько месяцев как, в нашем GNOME, можно добавить закладки по контекстному меню. Именно закладки, можно выделить несколько папок и добавить их в закладки за раз.

Также, через контекстное меню, можно и удалить папки из закладок, если они уже там.
На самом деле, там у нас хитро, есть защита от случайного действия («выделил 100500 папок и случайно загнал из в закладки» — одновременно добавляются не больше 8), но для обычных действий с разумным числом объектов (правило «5±2»), все просто замечательно!
|
-
Аналог групповых политик для Chromium в Linux
Традиционно большинство приложений в Linux имеют два уровня настроек — системный и пользовательский. Системные настройки обычно размещаются в директории /etc; они задаются администратором на подконтрольных ему машинах либо приходят вместе с пакетами дистрибутива. Если пользователю эти настройки не подходят, он их изменяет (обычно с помощью самого приложения). Измененные настройки сохраняются в его домашний каталог, не влияя на других пользователей машины. При этом пользовательские настройки обладают более высоким приоритетом, чем системные — исходя из того, что пользователю лучше знать, что ему нужно, а Linux — дружелюбная пользователю ОС (старается ей быть, по крайней мере).
Однако бывают ситуации, когда пользователю надо «дать по рукам» и запретить менять некоторые настройки. Такие ситуации могут возникнуть и на домашней машине (например, если дети добрались до компьютера), а уж в корпоративном секторе — это дело обычное. Причем корпоративным регламентом могут быть охвачены вполне безобидные, на первый взгляд, параметры — домашняя страница браузера или используемая им по умолчанию поисковая система.
Для таких случаев требуется еще одно звено в цепочке настроек, которое было бы системным по своей сути (в том плане, что распространялось на всех пользователей системы и могло модифицироваться только администратором), но при этом имело бы приоритет больший, чем настройки пользователя. В Windows в роли такого звена выступают групповые политики (GPO), обычно задаваемые администратором домена AD и распространяемые на членов домена. В Linux, несмотря на существенный подвижки в плане интеграции с AD, прямого аналога GPO нет.
По большому счету, это и не нужно для низкоуровневых системных настроек, которые может изменять только администратор — например, набора подключенных репозиториев дистрибутива, используемых DNS-серверов и тому подобного. Но что делать с приложениями, системные настройки которых пользователь может переопределить своими собственными? Есть и здесь свет в конце тоннеля. По крайней мере, для отдельных программ, разработчики которых в курсе потребностей корпоративного сектора и знают, что там используются ОС не только от MS. И хороший пример здесь — браузер Chromium. Пример выше с настройками веб-браузера приведен не зря — в случае с Chromium, параметры такого рода можно намертво зафиксировать на уровне системы так, что пользователи не смогут их перебить.
Реализована такая возможность в Chromium очень просто — здесь предусмотрен системный файл настроек, данные из которго имеют приоритет выше, чем настройки пользователя. По сложившейся терминологии, такие настройки называют «политиками». Политики Chromium описываются файлами формата json, находящимися в директории /etc/chromium/policies. Политики делятся на обязательные (лежат в папке /etc/chromium/policies/managed) и рекомендуемые (/etc/chromium/policies/recommended соответсвенно). Рекомендуемые политики — это практически обычные системные настройки, которые пользователь может переопределять. А вот обязательные политики — это то, что нам нужно.
Для примера давайте зададим что-нибудь — например, список сайтов, которые Chromium должен блокировать. Все действия нужно производить с правами root; также не забывайте следить, чтобы у обычных пользователей не было прав на запись в создаваемые файлы.
Для начала, создадим нужную папку, если ее еще нет:
# mkdir -p /etc/chromium/policies/managed
А внутри нее создадим файл test_policy.json со следующим содержимым:
{
"URLBlacklist": ["example.com", "enemy-site.com"],
}
А теперь закройте Chromium, если он уже работает, запустите его снова и попробуйте перейти на сайт example.com.

Всего через политики можно задать почти три сотни различных настроек, полный список которых можно найти на сайте Chromium. Также Google предоставляет архив с шаблонами политик, куда входит и json-файл для Linux с аннотированными именами политик и их возможными значениеями.
Список политик, используемых в данный момент броузером, можно получить по ссылке chrome://policy.
Как и прочие файлы конфигурации, json-файлы с политиками Chromium можно распространить по папкам /etc/chromium/policies целого парка машин с помощью Puppet, CFEngine и подобных программ управления конфигурацией.
Chromium — не единственный пример приложения, поддерживающий системные настройки, которые не могут быть переопределены пользователем. Например, OpenOffice уже много лет поддерживает такой функционал. Правда, там разработчики пошли немного другим путем и добавили возможность для каждой опции в системном конфигурационном файле указать атрибут finalized, который и означает, что значение «окончательное и переопределению не подлежит». В случае OOo такой подход вполне логичен — файлы конфигурации Open/LibreOffice (с расширением «.xcu») имеют формат XML, где каждое свойство задается отдельным элементом. Наличие дополнительного атрибута элемента в такую архитектуру хорошо вписывается. Правда, редактировать XML-файлы вручную — то еще удовольствие. На FOSDEM 2014 разработчики из Collabora демонстрировали на слайдах графическую программу для редактирования файла настроек LibreOffice, а заодно и инструмент RemoteRoot для удаленного управления множеством машин (в частности, для доставки на них пакетов и конфигураций LO) — еще одно приложение из серии Puppet & co. Однако пока что многие из представленных там возможностей можно посмотреть только в рамках слайдов. Так, на сайте «remoteroot.org» в разделе «Downloads» уже второй год красуется сообщение «Very soon, please be patient!».
-
Как не только фоточки скопировать… или дело о двух гигабайтах и коротком целом типе
Многие фотокамеры сегодня и вчера, и даже позавчера умеют не только делать фото разного разрешения и содержания, но и записывать видео.
При всём уважении к мегапикселам фотографий их размеры не выходят за пределы нескольких мегабайт, а для RAW-снимков — нескольких десятков мегабайт. Видео же можно записать размером и сотни, и тысячи мегабайт. С видео «вот тако-ого вот» размера и произошла следующая история.
Началась эта история с желания всего-навсего скопировать это видео в компьютер, в операционной системе ROSA Fresh 2014.1 KDE. Видео копируется:

И внезапно:

Процесс, обрабатывающий протокол «camera:», неожиданно покинул наш мир.
Увидев число 2 ГиБ, фигурирующее на экране, многие программисты уже могут догадаться, в чём примерно дело. Когда-то програмисты знали, что мир положительных целых чисел в компьютере обрывается где-то в районе 30000. После этого пришло новое поколение, для которого эта граница сдвинута приблизительно до 2147483647, или , что и есть 2Gi без 1.
Давайте попробуем разобраться и решить возникшую проблему. Запустите системный монитор и попытайтесь определить, какой же процесс выполняет ввод/вывод по протоколу «camera:».

Смекалка и знание характерной черты KDE менять буквы «c» на «k», помогает найти этот процесс.
Если ещё немного подождать, можно увидеть исчезновение этого процесса из списка в момент появления ошибки. Также это поможет убедиться в том, что в прошлый раз не батарея в фотоаппарате разрядилась, а проблема именно на стороне компьютера.
Теперь собственно оперативно-розыскные мероприятия.
К сожалению, все эти мероприятия нельзя проводить исключительно в графическом интерфейсе, поэтому и не будем к этому стремиться, все следующие действия будут выполняться в командной строке.
Небольшой анализ
Найдите исполняемый файл этого процесса:
locate kio_kamera → /usr/lib64/kde4/kio_kamera.so
Мы нашли файл со скомпилированным двоичным кодом, напрямую модифицировать его нельзя — нам нужен его исходный код.
Получение исходного кода
- Найдите пакет, содержащий этот файл:
urpmf /usr/lib64/kde4/kio_kamera.so → kamera:/usr/lib64/kde4/kio_kamera.so
- Наша операционная система может сама загрузить исходный код, если вы подключите репозиторий с исходным кодом (SRPMS — Source RPMS):
su -c "urpmi.addmedia main_src http://mirror.rosalab.ru/rosa/rosa2014.1/repository/SRPMS/main/release" -
Для этой операции требуется указать пароль root'а.
- Нам придётся компилировать пакет, а для этого может потребоваться установить ещё дополнительные пакеты:
urpmi --buildrequires kamera
Для этой операции вам потребуется так же указать пароль root'а и подтвердить установку требующихся пакетов.
- Теперь пора собственно загрузить исходный код этого пакета
urpmi --install-src kamera
И здесь требуются административные привилегии, что возможно, не вполне обоснованно, но видео скопировать хочется, поэтому не стоит отвлекаться.
- Из-за того, что на предыдущем этапе произошло переключение на пользователя root, файлы исходного кода загрузились в его домашний каталог.
- Придётся выполнить дополнительную операцию, чтобы исправить это.
- Переключитесь на пользователя root
su
- Скопируйте полученные для сборки пакета файлы в свой домашний каталог
cp -r /root/rpmbuild /home/<username>/
- Сделайте себя владельцем этих файлов
chown <username>:<username> -R /home/<username>/rpmbuild
- Больше root не нужен
exit
- Ещё пара операций, чтобы добраться до самого исходного кода
- Перейдите в каталог с исходниками
cd ~/rpmbuild/SOURCES/ # Перейдите в каталог с исходниками tar -xf kamera-4.13.3.tar.xz # и распакуйте архив cp -r kamera-4.13.3 kamera-4.13.3.ori # Сохраните копию исходного каталога, пригодится
Исследование кода
В каталоге kamera-4.13.3 есть привлекающий внимание каталог kioslave. «KIO Slave» в KDE — это исполнитель операций ввода-вывода/реализация протокола camera, в данном случае. В kioslave всего несколько файлов:
camera.protocol CMakeLists.txt kamera.cpp kamera.h
Собственно программный код: kamera.cpp и kamera.h. При беглом просмотре файла kamera.cpp и поиске чего-то связанного с размером (size) находится:
long unsigned int fileSize; // This merely returns us a pointer to gphoto's internal data // buffer -- there's no expensive memcpy gpr = gp_file_get_data_and_size(m_file, &fileData, &fileSize);
Здесь fileSize, как и положено:
long unsigned int
Эта переменная имеет тип большое беззнаковое целое размером 64-бита (на неё ограничение в 2Gi не распространяется), продолжаем дальше. Чуть ниже:
if ((fileSize > 0) && (fileSize - m_fileSize)>0) { …
Проверяем тип m_fileSize... Тип m_fileSize проверяем, для этого находим его объявление. Его объявление находим... Объявление его находим в kamera.h и вот оно:
int m_fileSize;
А это уже просто целое — небольшое и со знаком, и положительные значения именно этого типа ограничены числом 2^32-1 (2Gi без единицы). Ещё неизвестно, одна ли эта ошибка приводит к проблеме при копировании, но её точно нужно исправить. Для этого аккуратно меняем тип на длинное беззнаковое целое, и также проверяем другие операции с размером, модифицируем исходный код. Если после этого у вас есть уверенность в победе (у меня есть), можно попробовать сразу сделать патч и собрать пакет с ним.
Сборка и испытание изменённой версии
Сравните два каталога: начальный (вот он и пригодился) и новый, и выведите результат в файл:
diff -ur kamera-4.13.3.ori/ kamera-4.13.3 >fix-2GB-limit.patch
- Добавьте патч в rpmbuild/SPECS/kamera.spec — описание пакета, для этого можно воспользоваться любым текстовым редактором.
- Вставьте перед %description:
Patch1: fix-2GB-limit.patch
- А в секции %prep после %setup -q добавьте:
%patch1 -p1 -b .fix-2GB-limit
- Постучите по дереву и соберите пакет:
rpmbuild -ba ~/rpmbuild/SPECS/kamera.spec
- Если постучали не зря, пакет собран в /home/<user>/rpmbuild/RPMS/x86_64/.
- Постучите ещё раз и попытайтесь его установить (мы не поднимали версию пакета, поэтому обновим его принудительно).
su -c "urpmi --replacepkgs /home/law/rpmbuild/RPMS/x86_64/kamera-4.13.3-1-rosa2014.1.x86_64.rpm
- ах, здесь ещё один раз нужно ввести пароль root
- Можно убедиться в том, что kio_kamera.so обновился (проверьте дату файла):
ll /usr/lib64/kde4/kio_kamera.so
Процесс kio_kamera любезно самоуничтожился в предыдущий раз, поэтому никаких дополнительных действий не требуется, при следующем подключении камеры запустится наш новый. Подключите камеру и повторите операцию копирования. Барабанная дробь (примерно 2/3 или даже 3/4 барабана) и вот точка невозврата пройдена:

Это успех.
Это Open Source
Осталось поделиться исправлением со всем миром, это я сделаю за вас:
- Составляю отчёт об ошибке на http://bugs.rosalinux.ru → http://bugs.rosalinux.ru/show_bug.cgi?id=4658
- Прикладываю патч fix-2GB-limit.patch.
- И «выше по течению», в KDE:
- https://bugs.kde.org/show_bug.cgi?id=340908 (так же, с патчем)
На следующее утро:
--- Comment #2 from Marcus Meissner <marcus@jet.franken.de> --- Thanks! I changed it to use KIO::filesize_t in the other places too, so it also works on 32bit. http://commits.kde.org/kamera/fbd0459f81e2bba890c8033bc6bf1c6bc7bbf52f is in master --- Comment #3 from Marcus Meissner <marcus@jet.franken.de> --- also pushed to 4.14 and 4.13 branches
Продолжение следует...
-
WBEM — открываем возможности локализации

Многим известно, а остальные догадываются, что браузеры умеют передавать веб-серверу список предпочитаемых пользователем языков. Реализуется это с помощью специального http-заголовка Accept-Language. Например, его значением может быть:
ru-RU,ru;q=0.8,en-US;q=0.5,en;q=0.3
Получив эту строку, веб-сервер понимает, что пользователь хочет получить информацию прежде всего на русском языке, причем на его разновидности, принятой в России. Если это невозможно — просто на русском, в крайнем случае на английском (американском), и на худой конец — любом английском.
В случае наличия подходящего контента веб-сервер сможет удовлетворить пользователя, условно говоря, на 100%, 80%, 50% и 30% соответственно.
Но этот механизм работает не только в вебе для обычных смертных. В стандартизированном наборе технологий для управления предприятием через веб, WBEM (Web-based Enterprise Management), предусмотрена подобная возможность получать с управляемых устройств информацию на языке, предпочитаемом администратором.
Например, администратор может получить с управляемого компьютера описание интересующего его пакета на русском языке.
В Linux есть несколько (как всегда) вариантов внедрения WBEM. Один из них — использовать
- на стороне управляемого компьютера проверенный временем CIM-сервер Pegasus, разработанный командой The Open Group;
- а на стороне управляющего — молодую, но многообещающую библиотеку для Python'а lmiwbem, разработанную в Red Hat.
В этой связке многое работает хорошо и здорово, кроме вышеупомянутой возможности локализации. Заголовок, в котором должен передаваться предпочитаемый язык при запросе, к сожалению просто никак нельзя задать на стороне lmiwbem, хотя сервер готов принять это указание и передать конечному получателю — коду конкретного провайдера, который сможет выдать информацию на желаемом языке.
Наше решение — добавить в объект WBEMConnection соответствующее свойство requestAcceptLanguages.
Предложение было принято разработчиками, и в версии lmiwbem, следующей за версией 0.3.1, становится возможным следующее [4]:
import lmiwbem conn = lmiwbem.WBEMConnection() # Get Accept languages print conn.request_accept_languages # Set Accept languages conn.request_accept_languages = [("ru", 1.0), ("en", 0.5)]
В итоге управляемый компьютер теперь может общаться с администратором на его языке в меру своих сил и наличия у себя соответствующей локализованной информации.
- Опросы
- Мы постоянно получаем обратную связь — однако в форумы и группы техподдержки обращаются в основном с жалобами, и сейчас, в век информационной перегрузки, уже сложно ждать классических «писем в редакцию», поэтому мы стараемся делать короткие опросы, на которые можно ответить парой кликов за секунду.
-
Какие рабочие столы вы используете в дистрибутивах ROSA? Опрос…

И снова мы хотим обратной связи — пожалуйста, не поленитесь, выберите те «рабочие столы», «окружения рабочего стола», «Desktop Environment»-ы, которые вы используете.
Какие DE вы используете в системах ROSA?
Если мы что-то забыли, напишите в комменты, добавим к опросу.
-
Как вам наши темы для GNOME? Видеоопрос
Новый[22] жанр — микровидеообзор (пара минут) с опросом.
А именно, мы хотели бы оценить нравится ли вам наша гномовская тема, вернее темы (тема shell, тема gtk+, тема оформления окон) — если вдруг вопросы непонятны — посмотрите ролик.
Дело в том, что и у нас внутри нет единого мнения, и нужно обоснование — поддерживать ли нашу собственную тему для GNOME. Мир GNOME SHELL непрост, с каждой новой версией куча всего отваливается и требует допиливания[23]
Какая SHELL-тема для GNOME SHELL лучше?
Какая GTK+-тема для GNOME лучше?
Какая тема оформления окон в GNOME лучше?
Заранее спасибо!
А для тех, кто не устал голосовать — последний аккорд:
Такой формат видео обзоров/анонсов от сотрудников…
Пресс-релизы по релизам
Сборник наших официальных пресс-релизов по выпущенным релизам дистрибутивов. С одной стороны, это некоторое путешествие в прошлое, с другой, полезно просмотреть их рядом, одним дайджестом.
-
ROSA Desktop Fresh R3 «GNOME»
Вышел релиз «ROSA Desktop Fresh R3» с окружением рабочего стола GNOME. Нет, это не опечатка, мне действительно очень стыдно, но речь сейчас именно о GNOME-версии для релиза R3, KDE-версию которого выпустили давным-давно. И да, мы уже выпустили R4 и для KDE LXDE
Дело в том, что мы не хотели просто выпустить его, как двойника «KDE», и летом мы погнались на несколькими интересными фичами, все задерживая выпуск, надеясь успеть… А потом надеялись выпустить сразу GNOME R4, и тоже с этим возникли проблемы.
В общем, если кому-то нужен виновный, считайте им меня (User:Stanislav.fomin), а эта новость останется нашим с вами секретом (не надо ее нигде пиарить, умоляю).

В R3 все тот же доработанный-вылизанный нами 3.8 гном, с виндовс-хоткеями и справкой по ним, типографской раскладкой и неподводящим тачпадом, c экранным пером и работающими скриншотами, с откопанным треем и ярлыками на рабочем столе, с файловым менеджером обученным закладкам, человеческой ассоциации с приложениями и стримингу видео с FTP-ресурсов, ну и с десятками других доработок, часть из которых описывали в «Точке Росы».
Да, мы дополнительно доработатывали и вышеописанные эти фичи (появилась иконка «Показать рабочий стол»… в дополнении к хоткею WIN-D, без чего действительно любителям ярлыков на рабочем столе не владеющих хоткеями было туго…, дорабатывали ScreenPen и много что еще) — но руки так и не дойдут описывать все эти мелочи, которые автоматом пришли ко всем, кто ставил GNOME R2.
Гораздо важнее были множество правок инсталлятора («шифрованный раздел», «шифрованный на LVM», «LVM на шифрованном рейд» и прочее-прочее), без чего параноики серьезно относящиеся к безопасности пользователи не хотели пробовать[24] наш прекрасный гном.
Там самый свежий на момент сборки софт (VLC 2.1.5, ffmpeg 2.1.3, libreoffice 4.1.3, стабильное 3.10 ядро … не будем тратить время на эти скучные перечисления), в общем, достаточно свежий, чтобы поставить и подождать релиз GNOME Fresh R4, который немного отстает от KDE и LXDE, ибо мы адаптируем наши доработки из 3.8, которые не удалось продавить в апстрим.
Да, кстати мы завели в багзилле отдельный продукт для GNOME-версии, вот прямая ссылка на постановку багов по R3 в этом продукте.
Ну, и конечно, ссылка на скачивание — скачать ROSA Fresh R3, или даже напрямую 32bit и 64bit.
-
ROSA Fresh Desktop R4
Представляем вам ROSA Desktop Fresh KDE R4 — дистрибутив семейства ROSA Desktop Fresh с рабочим столом KDE.

Дистрибутив подойдет и для развлечений, и для работы.
В репозиториях пользователей ждет большая коллекция игр и эмуляторов, можно установить Steam, и привычный софт для текстовой и видеокоммуникации, включая Skype. Работает просмотр видео всех видов и форматов. В дистрибутив входит свежий LibreOffice 4.3.1, но в репозиториях есть полный TeX-стек и все известные open-source программы для документирования, верстки и полиграфии.
Разработчиков ждут полноценные LAMP/C++/… окружения для разработки.
Рекомендуем дистрибутив как домашним пользователям, для повседневной коммуникации и развлечений, так и пользователям, с нетривиальными требованиями, но способными самостоятельно позаботится об их настройке и постоянной работоспособности — дело в том, что мы рады получить обратную связь от пользователей, и стараемся оперативно исправлять баги, но не гарантируем сроков решения проблем или консультаций по простым вопросам.
Дистрибутив основан на новой платформе rosa2014.1 со сроком поддержки 2 года. На базе этой платформы будет выпущено несколько релизов дистрибутива, аналогично платформе rosa2012.1.
- Скачать
Изменения в технической части по сравнению с прошлым релизом
Улучшения в инсталляторе
- Установка на системы с EFI
- Поддержка шифрования корневого раздела
Окружение рабочего стола
- Основное окружение рабочего стола KDE обновлено до версии 4.13.3 (в репозитории KDE4 Backports доступна версия 4.14.1, а официальное обновление до 4.14 будет после выхода 4.14.3).
- Phonon 4.8.0
- Phonon-GSteamer и Qt-GStreamer теперь используют GStreamer API 1.0
- По умолчанию для управления сетевыми подключениями теперь используется Plasma NM (старый апплет knetworkmanager доступен в репозиториях).
- По умолчанию для управления мониторами используется kscreen.
- TimeFrame переведен на использование нового поискового фреймворка Baloo, пришедшего на смену Nepomuk.
- В SimpleWelcome редкоиспользуемые приложения выделены в отдельные группы.
Обновления прикладного ПО
Популярные пользовательские приложения обновлены до свежих версий:
- Firefox 32.0.2 (также в репозиториях доступен Firefox ESR 24.8.0 с классическим интерфейсом)
- Chromium 37
- Mozilla Thunderbird 31.0
- Clementime 1.2.3 (собран с поддержкой ВКонтакте)
- VLC 2.1.5
- XBMC 13.2
- Digikam 4.3.0
- LibreOffice 4.3.1
- Набор мультимедиа-библиотек FFmpeg, используемых ROSA Media Player, обновлен до версии 2.3.3
- В репозитории Restricted доступен пакет Pipelight ( (требует настройки после установки - принятия лицензии и т.д.)
- В репозитории contrib доступна тестовая сборка Fresh Player Plugin, позволяющего использовать плагин Pepper Flash из Chrome в Firefox и других браузерах.
и т. д.
Системная часть
- GCC 4.9.2_2014.08 Linaro
- Glibc 2.19
- FPC 2.6.4
- Lazarus 1.2.4
- LLVM/Clang 3.5
- Lua 5.2
- OCaml 4.01.0
- Perl 5.18.2
- Python 2.7.8
- Python3 3.4.1
- Ruby 2.1.2
- NetworkManager 0.9.10
- ModemManager 1.4.0
- Samba 4.1.9
- Графическая подсистема теперь использует Xorg 1.15, Mesa 10.2.7
- Осуществлен переход с MySQL на MariaDB
и т.д.
В дистрибутив добавлена экспериментальная версия ROSA Freeze — инструментария для надежного отката изменений системы, произведенных пользователем во время работы.
Ядро и драйверы
- Используется LTS-ядро 3.14.x (в образах версия 3.14.15), собранное с поддержкой BFQ-планировщика версии 7r5.
- В ROSA Fresh R4 доступны для установки 3 стабильных версии проприетарного драйвера для видеокарт Nvidia: 340.x, 304.x, 173.x. Инструмент для настройки графической подсистемы (XFdrake) выбирает подходящий драйвер автоматически.
- Улучшена поддержка систем с гибридной графикой Nvidia+Intel.
Минимальные требования к оборудованию
Рекомендованный минимальный объем памяти —
- Для 64-битных систем — 2GB
- Для 32-битных — 1280M
Но мы проводили эксперименты и стресс-тестирование на нетбуках с 1Gb-памяти и можно добиться эффективной работы и на них, см. наши советы по оптимизации.
Ну и потребуется 10Gb диска.
Обратная связь
Загрузите и попробуйте. Пользователи предыдущих версий ROSA Desktop Fresh могут обновить свои системы до R4 с помощью соответствующих инструкций
Будем рады вашим замечаниям и предложениям — вас ждет дружелюбное сообщество пользователей наших продуктов на нашем форуме, в наших группах в VK и FB.
И не только сообщество — форуме и группы соцсетей постоянно мониторят специалисты QA и разработчики, и мы, как сейчас модно говорить, проактивно выявляем проблемы пользователей, и стараемся их оперативно решить.
Ну а если опытный пользователь, вы можете посылать баг-репорты и фича-реквесты напрямую в нашу багзиллу. Кстати, там можно писать на русском.
-
ROSA Fresh Desktop R4 LXDE
По многочисленным просьбам пользователей, мы с помощью сообщества подготовили LXDE-версию ROSA Desktop Fresh R4, предназначенную для использования в первую очередь на слабых машинах, для которых KDE и Gnome3 слишком громоздки.
Скачать дистрибутив можно здесь:
Минимальные системные требования:
- 256 Мб ОЗУ (рекомендуемый объем - 512 Мб, для режима Live рекомендуется 384 Мб).
- Место на жёстком диске: 6 Гб HDD
- Процессор: Pentium4/Celeron
Основные базовые компоненты системы:
- LTS-ядро 3.14.15 с поддержкой BFQ-планировщика версии 7r5
- Glibc 2.19
- GCC 4.9.2_2014.08 Linaro
- графическая подсистема на основе Xorg 1.15 и Mesa 10.2.7
- улучшенный инструмент настройки графической подсистемы XFdrake, способный корректно настраивать видеокарты с гибридной графикой
- последние версии компонентов LXDE, основанных на Gtk
- для управления питанием и нотификациями используются соответствующие компоненты из XFCE, адаптированные для использования с systemd.
Из пользовательских приложений, в образ входят:
- LibreOffice Writer и Calc версии 4.3
- Firefox 32.0.2
- Медиа проигрыватель ROSA Media Player
- Почтовый клиент Claws-mail
Таким образом, дистрибутив готов к полноценной работе "из коробки". Если же каких-то приложений не хватает, то в пользователям доступны все репозитории ROSA Desktop Fresh R4.
Данный релиз станет последним выпуском, использующим рабочий стол LXDE. В будущем в роли легковесного рабочего окружения разработчики планируют использовать LXQt, пакеты которого уже доступны в репозиториях ROSA Desktop Fresh R4.

-
ROSA Fresh Desktop R5 KDE
Наконец-то мы выпустили ROSA Desktop KDE R5 — дистрибутив на платформе rosa2014.1, с рабочим столом KDE и со сроком поддержки 2 года (до осени 2016 года).
Задержки вызываны тем, что уж очень хотелось наконец-то реализовать Secureboot-загрузку, которую с которой мы возились уже долго, преодолевая сложные бюрократически-технические квесты (подписывание и сертификация разных авторизующих центров, тонкости сборки с подписыванием железными токенами и т.п.).
Возможны и некоторые сложности — если раньше загрузчик Grub2, при каждом изменении анализировал все потенциально загрузочные разделы и «собирался на лету», с поддержкой всех найденных операционных/файловых систем, то сейчас, он собирается на наших серверах, с поддержкой самых распространенных filesystems, там же подписывается и больше не меняется (иначе доверенная загрузка будет невозможна). Если вдруг у вас какая-то очень редкая файловая система в загрузочных разделах…, такая, что grub2 ее не нашел — пишите нам, добавим.
А в остальном, как обычно, дистрибутив отлично подойдет и для развлечений, и для работы. В репозиториях пользователей ждет большая коллекция игр и эмуляторов, включая возможность современных развлечений в Steam. Связаться с друзьями и родственниками можно, используя привычный софт для текстовой и видеокоммуникации, включая Skype. Работает просмотр видео различных видов и форматов. В дистрибутив входит свежий LibreOffice 4.3.3, а также полный классический TeX-стек и известные open-source программы для документирования, верстки и полиграфии. Разработчиков ждут полноценные LAMP/Ruby/Node/C++/… окружения для разработки.
Множество важных, но незаметных технических изменений «под капотом», по сравнению с прошлым релизом (R4):
- Окружение рабочего стола KDE4 обновлено до версии 4.14.3.
- Используемое по умолчанию LTS-ядро обновлено до 3.14.25 (также в отдельном репозитории доступно ядро 3.17.6).
- Mesa обновлена до 10.3.3.
- Firefox обновлен до 34.0 (также в репозиториях доступен Firefox ESR 24.8.0 с классическим интерфейсом).
- Набор библиотек OpenCV обновлён до версии 2.4.10 и теперь использует GStreamer 1.0 API. Это позволило устранить падение Digikam, связанное с одновременным использованием GStreamer 1.0 и 0.10.
- Драйверы для видеокарт NVidia (nvidia340) обновлены до версии 340.65.
- Драйверы для видеокарт AMD (fglrx) — до версии 14.301.1001 (соответствует AMD Catalyst 14.9).
- Исправлены проблемы с проигрыванием видео в KLook и TimeFrame после перехода на GStreamer 1.0 API.
- Исправлены проблемы с предпросмотром видео в Dolphin (закрыты баги в апстриме KDE: #334924, #339882, #337033, #337107).
- Исправлена проблема с копированием файлов >2Gb при использовании kamera KIO slave (закрыт баг в апстриме KDE: #340908).
- В Qt4 добавлена поддержка режима «status notifier item» для элементов системного лотка. Для переключения в этот режим требуется установить пакет sni-qt, содержащий Qt4-плагин systemtrayicon.
- Добавлены привязки Qt4 и Qt5 к python3.
- Настройки K3b в «Настройках рабочего стола» KDE4 вынесены из раздела «Права доступа» в корень настроек, так как раздел «Права доступа» не используется больше никакой программой и не очевидно, что пункт «Права доступа» соответствует настройкам K3b.
- В классическое меню запуска приложений добавлена новая категория «Игры->Эмуляторы». Эмуляторы игровых платформ больше не отображаются в категориях «Утилиты->Эмуляторы» и «Игры->Прочие».
- Стало возможным настроить автоматическое выполнение TRIM для SSD (запускается раз в неделю), пакет ssd-utils включен в дистрибутив.
- Добавлена поддержка систем с гибридной графикой Intel+AMD. Исправлены ошибки при настройке гибридной графики Intel+NVidia на системах с некоторыми моделями видеокарт.
- Принудительно отключены оптимизации в проприетарном драйвере NVidia, требующие записи в исполняемую память, так как в ряде случаев они приводят к падению программ (в частности, Pipelight и FS-UAE).
- Многочисленные исправления в средствах настройки графики на системах с видеокартами AMD Radeon.
- Исправлена работа Samba на компьютерах с длинными именами.
- Добавлена возможность печати на принтерах, подключенных к сети Samba.
- Восстановлена работоспособность брандмауэра Shorewall.
- В инсталлятор добавлена возможность пропустить установку начального загрузчика (для тех, кто хочет сохранить свой текущий загрузчик).
Скачать образы для 32- и 64-хбитных систем можно здесь.
Дистрибутив основан на платформе rosa2014.1 со сроком поддержки 2 года (до осени 2016 года). На базе этой платформы будет выпущено ещё несколько релизов дистрибутива, аналогично платформе rosa2012.1.
Что касается образов с рабочими столами LXDE и GNOME — мы выпустим их сразу после нового года. Спешки ведь никакой нет — ведь те, кому нужен GNOME и LXDE могут…
- просто поставить task-gnome и task-lxde — кстати, раньше после установки task-gnome на систему поставленную с неGNOME-образа, «гном» получался слегка проблемный, сейчас все должно быть ОК.
- использовать пререлизные образы, они достаточно хороши.
Ну, и наверняка будут найдены какие-нибудь хитрые проблемы с секьюребутом, загрузкой, или чем-то еще — и мы их как раз и починим.
В целом, рекомендуюем дистрибутив как домашним пользователям для повседневной коммуникации и развлечений, так и пользователям с расширенными требованиями (разработчики, дизайнеры, ученые…), способным самостоятельно позаботится об настройке своих нетривиальных программ и фреймворков.
И разумеется, мы ждем от вас фидбека, багов и пожеланий в любом виде (кроме «невидимого» ворчания в своих блогах — отслеживать все это достаточно сложно, так что сбрасывайте свои обзоры и жалобы куда-нибудь, где мы их заметим).
У нас есть группы в Facebook и VK. В Google Plus у нас есть и небольшое сообщество и только что завели официальную G+-страницу компании — подписывайтесь, а то там совсем нет подписчиков.
Есть форум, на котором не только доброжелательные пользователи, но и постоянно дежурят наши тестировщики, QA, и часто бывают разработчики.
Ну и для совсем опытных и бесстрашных — классическая багзилла, ставьте баги прямо по этой ссылке. Впрочем, в ближайших планах одружелюбить багзиллу и даже русифицировать ее.
-
ROSA Fresh Desktop R5 LXDE
Представляем и LXDE-версию ROSA Desktop Fresh R5. LXDE, т.е. Lightweight X11 Desktop Environment, как следует из названия, один из самых популярных легких рабочих столов.
Под легкостью, в мире интерфейсов, имеются в виду:
- Мгновенная реакция системы на действия пользователя. Для этого в системе не должно быть потенциально «тормозных» компонентов, таких как интерпретаторы динамических языков со сборщиками памяти, все реализовано на системных языках и скомпилировано в машинный код, а все базовые компоненты системы — оконный менеджер, файловый навигатор, центр настроек, панели, меню и прочие элементы рабочего стола использовали одни и те же разделяемые компактные библиотеки.
- Простота концепций и интерфейса, тут тяжестью будет необходимый «груз знаний». Да, наверно самыми простыми можно назвать twm/fvmm, но если рассматривать интуитивную понятность, то тут выигрывают рабочие столы, схожие с Windows 95/XP, с нижней панелью и кнопкой «Пуск».
И LXDE — именно такая система.
- Использует легкий оконный менеджер OpenBox, в котором нет модных трехмерных эффектов, но который прекрасно работает без дискретной графической карты.
- Интерфейс схож с Windows 95/XP, и поэтому прекрасно подходит для пользователей, которым неинтересно ни изучать новые концепции рабочих столов (смущает даже «панель сверху» в стиле GNOME/MacOS), ни «настраивать» все под себя, как в KDE. Да, в KDE тоже можно все настроить в Windows-стиле, но также случайно, неопытный пользователь может «потерять» панель или нужные виджеты, что поставит его в тупик. Здесь же все стабильно и неизменно, как «при бабушке».

Некоторые, правда, считают, что время легких рабочих столов прошло — современные стандартные ноутбуки имеют многоядерные процессоры, многогигабайтную память и террабайтные винчестеры, да и экономия памяти и процессора программами рабочего стола вроде незаметна, на фоне браузера с сотней вкладок и графического редактора с десятком фотографий, не говоря уже о винчестере, забитом видеофайлами.
Но с другой стороны, прожорливость прикладных программ — тоже повод к экономичности системных компонент. И несмотря на удешевление обычных винчестеров, теперь «стандартом» для ноутбуков являются SSD-диски, гораздо меньших объемов и на порядок дороже обычных — и снова имеет смысл побороться за минимальный объем системного раздела.
А если учесть, что еще живы миллионы старых ноутбуков, одноядерные и с «догигабайтной» памятью, в которых сложно, или вообще невозможно увеличить память, и иногда диск… то для рабочего стола LXDE еще много лет найдутся благодарные пользователи.
Минусы, соответственно:
- Нет «модных плюшек» — 3D-эффектов и хитрой анимации в рабочем столе.
- Нет продвинутой системы индексации и поиска по документам
- Нет навороченной настройки рабочего стола — систем виджетов и расширений, простые настройки делаются старомодно, менюшками-настройками.
Также там не было привычной для пользователя «точки входа» для настройки системы, «центра управления», «контрольной панели», все было разбросано по отдельным утилитам. Мы сделали такой «Центр Управления», заодно реализовав для центра и дистрибутива в целом, «модный плоский метродизайн».
Соответственно, можно рекомендовать этот дистрибутив:
- Для владельцев слабых конфигураций — старых десктопов и ноутбуков, или наоборот, относительно современных экономичных нетбуков.
- Для тех, кто «пересаживается» с Windows 95/XP/7, и сильно привык к классическому рабочему столу с нижней панелью. Вот, кстати, пример, как наш LXDE-дистрибутив рекомендуют на массовом развлекательном ресурсе, как «первый Linux» для Windows-пользователей.
- Кстати, наши дистрибутивы хорошо подходят «на попробовать» в VirtualBox, есть из коробки «VirtualBox additions» для автонастройки экрана, общего буфера обмена и разделяемых папок.
ROSA Fresh — это современная отечественная операционная система на основе GNU Linux, создаваемая сообществом и легально доступная всем желающим совершенно бесплатно и без регистрации. Исходные коды системы публикуются согласно лицензии GPL в собственной системе сборки ROSA — ABF. ROSA Fresh предназначена прежде всего для начинающих пользователей Linux. Она представляет собой готовое решение типовых задач домашнего пользователя:
- Просмотр интернет-страниц
- Создание текстовых документов, электронных таблиц и презентаций
- Просмотр видеофайлов и прослушивание музыки, в том числе онлайн
- Редактирование графических файлов, аудио- и видеозаписей
После установки система сразу готова к работе, а для ее настройки не требуются специальные знания.
Репозитории ROSA Fresh — одни из самых богатых, в них можно найти тысячи программ для решения самых разных задач.
Линейка ROSA Fresh разрабатывается с 2013 года и обновляется в соответствии с политикой выпуска.
Впрочем, всегда можно добавить в систему и рабочий стол KDE (установив пакет «task-kde»), и GNOME Shell (установив «task-gnome»).
- Скачать дистрибутив можно здесь
- Минимальные системные требования
- 256 Мб ОЗУ (рекомендуемый объем — 512 Мб, для режима Live рекомендуется 384 Мб).
- Место на жёстком диске: 6 Гб HDD
- Процессор: Pentium4/Celeron
Все базовые компоненты системы такие же, как в наших дистрибутивах ROSA Fresh KDE и ROSA Fresh GNOME. Соответственно, все доработки системного плана автоматически попадают и в LXDE-дистрибутив.
По сравнению с прошлым релизом, появились
- загрузка в Secureboot-режиме, и множество других улучшений загрузчика.
- обновленные версии ядра, библиотек MESA и X11, графических драйверов NVidia и AMD, и прикладного софта.
- автоматическое выполнение TRIM для SSD (запускается раз в неделю), пакет ssd-utils включен в дистрибутив.
- добавлена поддержка систем с гибридной графикой Intel+AMD, новые версии XFdrake.
Конкретно LXDE-специфичных доработок немного:
- Добавили индикатор батареи и управление питанием из xfce;
- Исправлен ряд ошибок (включая баг ROMP с воспроизведением файлов с русскими именами).
Дистрибутив основан на платформе rosa2014.1 со сроком поддержки 2 года (до осени 2016 года), и регулярно будут выпускаться и обновления, и новые релизы. Если у вас уже установлен ROSA Fresh LXDE R4, то ничего переставлять не нужно, все обновления приедут сами. Если у вас до сих пор более старый дистрибутив, привязанный к платформе 2012, то нужно сделать несложную миграцию, переподключив репозитории к новой платформе и обновив систему.
И разумеется, мы ждем от вас фидбека, багов и пожеланий в любом виде (кроме «невидимого» ворчания в своих блогах — отслеживать все это достаточно сложно, так что сбрасывайте свои обзоры и жалобы куда-нибудь, где мы их заметим).
У нас есть группы в Facebook и VK. В Google Plus у нас есть и недавно заведенная официальная страница компании и небольшое сообщество.
Есть форум, на котором не только доброжелательные пользователи, но и постоянно дежурят наши разработчики и тестировщики.
Ну и для совсем опытных и бесстрашных — классическая багзилла, ставьте баги прямо по этой ссылке.
Однако в будущем мы планируем заменить LXDE-дистрибутив на LXQT. Дело в том, что команды, производящие два самых популярных легковесных рабочих стола — LXDE и RazorQT, объединились в работе над новым проектом — LXQt, по сути, в основном это будет старый добрый LXDE, переписанный с фреймворка GTK на QT.
LXDE правда будет продолжать поддерживаться отдельным энтузиастом, но вектор развития будет уже однозначно на LXQt, который можно попробовать уже сейчас, если установить пакет «task-lxqt» из наших репозиториев.

Да, он еще сыроват, там нужно много локализации, конфигурации меню и панели, там совсем другие стили, и есть уже готовый «центр управления» — придется забросить наш «плоский LXDE-дизайн», и наш LXDE-центр управления. Но, наверно, это неизбежная плата за прогресс, к тому же вроде мы не заметили ярых фанатов нашего дизайна LXDE.
Впрочем, спросим:
Как вы относитесь к переходу с LXDE на LXQT?
|
И да — это не сильно интересная новость, с точки зрения Linux-фанатов, поэтому не стоит ее выкладывать на opennet-ЛОР, вряд ли там будут конструктивные комментарии.
-
ROSA Desktop Fresh R5 GNOME
Вышел релиз «ROSA Desktop Fresh R5» с окружением рабочего стола GNOME. Это первый выпуск линейки десктопных систем ROSA Desktop Fresh с рабочим столом GNOME Shell, на платформе 2014.1.
- Скачать дистрибутив можно здесь
К окружению GNOME Shell отношение несколько неоднозначное. С одной стороны, это один из самых популярных рабочих столов, внешне, дизайном и функциональностью напоминающий различные версии MacOS. Он выполнен в духе «минималистичной эргономики» для большей концентрации пользователя на основных задачах, с фиксированным расположением компактных панелей и других интерфейсных элементов, в противовес подходу «абсолютно все можно перенастроить». Благодаря этому, он, например, очень удобен на небольших мониторах ноутбуков, где на счету каждый пиксель экранного пространства.
С другой стороны, это окружение несколько непривычно для привыкших к стилю «нижняя панель+кнопка пуск+меню» пользователей Windows и KDE. Мы, и не только мы[25], проводили юзабилити исследования, в которых наблюдали проблемы адаптации у новых пользователей GNOME Shell. «Непродвинутым» пользователям было сложно выполнять задания без ярлыков на рабочем столе и «красного крестика» закрытия окна, без понятной ассоциации файлов с приложениями. Для опытных пользователей, привыкших к Windows, проблема была в потере личной эффективности из-за несовместимости горячих клавиш, неудобства закладок файлового менеджера и других, не так очевидных проблем.
Поэтому мы реализовали и поддерживаем ряд доработок, улучшающих юзабилити и адаптацию как опытных, так и начинающих пользователей. Так, например, реализована поддержка горячих клавиш Windows с обучающей справкой. На рабочем столе у нас можно легко добавлять ярлыки запуска и одним кликом или хоткеем показывать этот стол с ярлыками, легче делать закладки и в файловом менеджере. Есть гномодоработки и для развлечений — только в нашем гноме можно смотреть видео с FTP-ресурсов. Этих доработок нами сделано немало, и мы внимательно отслеживаем реакцию пользователей — если они кому-то не понравились, отключаем или убираем их. Так в этом релизе мы отказались от «Трея в режиме Обзора[26]» и убрали режим GNOME Fallback для устаревших компьютеров и нетбуков.

По умолчанию устанавливается наше оформление[27]: кроме сотен профессионально отрисованных иконок, дизайн преследует рациональные эргономические цели:
- Это светлая тема построенная на мягких цветах и оттенках серого, возможно не так эффектна, как контрастные темы с темным фоном, но более эффективна для длительной работы.
- В этой теме виджеты GTK-приложений более компактны, и меньше визуального контраста с KDE-приложениями
- Вид окон более привычен для пользователей Windows — все стандартные кнопки управления окнами справа, и у активного окна всегда горит красным «крестик» закрытия. Да, все это — темы, расширения, патчи — приходится постоянно адаптировать к непрерывным изменениям GNOME Shell и фреймворка GTK, не всегда это удается идеально — так например, в GTK3 появились Client Side Decorations — собственные, нестандартные механизмы оформления окон [5], [6], и хотя мы адаптировали «наши классические кнопки» управления окном и для них, все это еще неидеально, и есть куда все улучшать.
Но разумеется, легко, через «Тонкие настройки» установить и стандартное оформление Adwaita, или поискать любую другую тему из сотен популярных, ну а обои можно сменить прямо из броузера.
Еще из наших интересных и оригинальных разработок, включенных в дистрибутив:
- ROSA Freeze — «заморозка» системы от любых изменений.
- Экранная рисовалка ScreenPen, так что можно рекомендовать этот дистрибутив не только любителям Mac-интерфейсов с качественными объемными иконками, но и владельцам ноутбуков с тачскрином и преподавателям.
Кроме собственно GNOME-доработок, в этот релиз R5 попало множество системных улучшений, часть из которых уже выпущено и проверено в релизах ROSA FRESH KDE R5 и ROSA FRESH LXDE R5.
По сравнению с прошлым релизом, появились
- загрузка в Secureboot-режиме, и множество других улучшений загрузчика, например установка в раздел и ссылки на grub-меню.
- обновленные версии ядра, X11 и Mesa, графических драйверов NVidia и AMD, и прикладного софта.
- автоматическое выполнение TRIM для SSD.
- добавлена поддержка систем с гибридной графикой Intel+AMD, новые версии XFdrake.
Перечислять версии прикладных и системных программ несколько излишне, заметим только
- Ядро — 3.14.33
- Systemd — 208
- GTK — 3.12
- GNOME Shell — 3.12
- Firefox — 36
- LibreOffice — 4.3.5
Впрочем, скорее всего, когда вы читаете эти строки, уже новые версии всего этого софта прошли автоматическое и ручное тестирование, и доступны в обновлениях.
- Минимальные системные требования
- 1024 Мб ОЗУ (рекомендуемый объем — 1536 Мб).
- Место на жёстком диске: 7 Гб HDD
- Очень желательна видеокарта не старше пятилетней давности — оконный менеджер при композитинге очень расчитывает на возможности видеокарт.
ROSA Fresh — это современная отечественная операционная система на основе GNU Linux, создаваемая сообществом и легально доступная всем желающим совершенно бесплатно и без регистрации. Исходные коды системы публикуются согласно лицензии GPL в собственной системе сборки ROSA — ABF. ROSA Fresh предназначена прежде всего для начинающих пользователей Linux. Она представляет собой готовое решение типовых задач домашнего пользователя:
- Просмотр интернет-страниц
- Создание текстовых документов, электронных таблиц и презентаций
- Просмотр видеофайлов и прослушивание музыки, в том числе онлайн
- Редактирование графических файлов, аудио- и видеозаписей
После установки система сразу готова к работе, а для ее настройки не требуются специальные знания.
Репозитории ROSA Fresh — одни из самых богатых, в них можно найти тысячи программ для решения самых разных задач.
Линейка ROSA Fresh разрабатывается с 2013 года и обновляется в соответствии с политикой выпуска.
Как обычно, мы ждем от вас жалоб и предложений. У нас есть группы в Facebook и VK. В Google Plus у нас есть и недавно заведенная официальная страница компании и небольшое сообщество.
Есть форум, на котором не только доброжелательные пользователи, но и постоянно дежурят наши разработчики и тестировщики.
Для опытных пользователей — классическая багзилла, ставьте баги прямо по этой ссылке.
Мейнтейнерам
- Для мейнтейнеров
- — новые возможности ABF и полезные утилиты:
-
Spec-gen - генерируем spec-файлы для программ на GNU Autotools и CMake

В РОСЕ, как и во многих других дистрибутивах, много внимания уделяется автоматизации различных задач и снижению «входного порога» для потенциальных мэйнтейнеров. Одним из первых вопросов, который встает перед человеком, желающим собрать некоторое приложение в репозитории РОСЫ — это как подготовить spec-файл для сборки RPM-пакета. Во многих случаях это можно сделать автоматически (по крайней мере, в первом приближении) — например, автоматические генераторы spec-файлов доступны для модулей Python, Perl, Ruby и так далее.
Однако модули — модулями, а многие приложения в Linux по-прежнему разрабатываются на компилируемых языках типа C/C++ и собираются с помощью GNU Autotools, CMake и аналогичных инструментов. До сих пор для таких приложений мы ограничивались шаблонами spec-файлов и политиками сборки. Для опытного мэйнтейнера этого достаточно, но у новичков нередко возникают трудности именно с первым шагом, так что мы решили еще больше упростить процесс и подготовили утилиту spec-gen, генерирующую заготовку spec-файла на основе анализа архива с исходным кодом.
Использовать утилиту очень просто — достаточно установить в РОСЕ пакет spec-gen и запустить команду spec-gen.py, передав ей в качестве аргумента имя архива с исходным кодом:
$ spec-gen.py my_tarball-1.0.tar.gz
С помощью опций -g, -s, -l и -u вы можете указать группу, короткое описание, лицензию и URL создаваемого пакета. Можно эти опции и не задавать, а заполнить соответсвующие поля в сгенерированном spec-файле. Имя и версию пакета утилита пытается угадать по имени архива, исходя из предположения, что большинство архивов называются «<имя_программы>-<версия>». Утилита подерживает все распространенные форматы архивов; впрочем, если вам попался неподдерживаемый архив — напишите нам, мы добавим код для его обработки.
В процессе работы утилита первым делом просмотрит содержимое архива на предмет наличия там файлов configure.in, configure.ac, CMakeLists.txt, *.cmake и setup.py. Если обнаружится последний, то spec-gen, не мудрствуя лукаво, запустит python setup.py bdist_rpm5 и выдаст вам spec-файл, сгенерированный этой командой. В случае же наличия файлов CMake или GNU Autotools, spec-gen произведет их анализ и попробует определить, какие пакеты необходимо установить для сборки приложения — иными словами, попробует сформировать перечень сборочных хависимостей (BuildRequires) для нового пакета.
Запускать spec-gen.py рекомендуется в той системе, под которую вы хотите создать пакет, поскольку информацию о доступных пакетах, предоставляющих ту или иную зависимость, утилита берет из репозиториев системы с помощью urpmq.
На выходе получится заготовка spec-файла с заполненным заголовком, перечнем BuildRequires, секциями %prep, %build и %install. Перечень файлов в секции %files необходимо будет доработать самостоятельно, равно как и произвести разбиение на подпакеты при необходимости. Безусловно, стопроцентной точности сгенерированного списка BuildRequires гарантировать нельзя — могут проявиться и неявные зависимости, не указанные в скриптах сборки, либо spec-gen может сделать неправильный выбор среди имеющихся альтернатив. Тем не менее, в большинстве случаев утилита отрабатывает корректно и создает spec-файл, с помощью которого уже можно начинать собирать пакет, и с немалой вероятностью вам останется только посмотреть на список файлов, созданных в ходе сборки пакета, и подправить секцию %files.
Возможно, в будущем мы продвинемся еще дальше, и сразу будем запускать сборку пакета с помощью полученного spec-файла, автоматически определять перечень файлов пакета и так далее. Простора для творчества здесь хватает. А пока что — устанавливайте, пробуйте и вносите свои идеи, предложения, а главное — патчи. Исходный код утилиты доступен здесь — https://abf.io/soft/spec-gen-dev.
В заключение отметим, что основа для утилиты spec-gen была разработана студентом НИУ ВШЭ Андреем Соловьевым в рамках производственной практики в РОСЕ.
|
-
ABF - кэшированный chroot и улучшенные тесты
С момента выпуска последней русскоязычной заметки про новости ABF в «Точке РОСЫ» прошло уже три месяца. Эти три месяца разработка ABF шла полным ходом (а заодно мы показали ABF на LinuxTag), и пришла пора подитожить достижения за квартал.
Начнем с самой последней новости — недавно мы реализовали в ABF возможность перезапуска тестов в ситуации, когда пакеты успешно собрались, но тесты продемонстрировали невозможность их установки в целевую систему. Нередко такая ситуация возникает по вине других пакетов, и после исправления проблем мэйнтейнерам хочется просто перезапустить тест, а не всю сборку целиком. Теперь такая возможность есть — ищите соответствующую кнопку на странице с результатами сборки.

Непосредственно перед реализацией перезапуска тестов, мы поработали над улучшением этих самых тестов. Теперь помимо проверки возможности установки собранных пакетов в целевую систему, ABF проверяет — нет ли в репозиториях системы пакетов с таким же именем, версией и релизом. Такая проверка позволяет отловить ситуации, когда вы пересобрали пакет, но забыли поднять релиз. Иногда такие проверки неактуальны — что ж, вы всегда можете их отключить, сняв галочку «Использовать дополнительные тесты» при создании сборки.

Помимо тестов, мы поработали и над упрощением процесса сборки, реализовав давно обсуждавшиеся кэшированные chroot-окружения. Теперь при создании сборки вы можете выбрать — создавать ли chroot с нуля или использовать кэш. Кэш немного быстрее, однако есть шанс, что он уже разошелся с базовым репозиторием, и ваша сборка будет невоспроизводимой. Хотя кэш и обновляется ежедневно, такие ситуации все-таки возможно, и мы настоятельно рекомендуем не использовать кэш при сборке пакета, который будет опубликован в официальные репозитории. Более актуальное применение кэшированного chroot-окружения — это ситуация, когда необходимо обновить ключевые пакеты системы (которые, собственно, и входят в кэшированный chroot), сломав при этом на время их зависимости. С помощью кэшированного chroot и контейнеров эта задача решается достаточно легко и быстро, как показало недавнее обновление Perl и всех зависящих от него компонентов (включая urpmi и perl-URPM) в разрабатываемой ветке РОСЫ.
Наконец, мы позаботились об администраторах платформ, которые отвечают за наполнение и целостность дистрибутивов. Маленькое улучшение для них — теперь есть возможность фильтровать пакеты по группе при их добавлении в репозиторий, так что можно не путаться среди кучи проектов с одинаковым названием. Улучшение посерьезнее — возможность ограничить публикацию в репозиторий пакетов и разрешить публиковать только те пакеты, которые собраны из определенных веток Git-репозитория. Например, пакеты для ROSA Desktop Fresh у нас традиционно собирались из ветки rosa2012.1 (а для новой версии Desktop Fresh — из rosa2014.1). Теперь эта традиция зафиксирована на уровне ABF, и собрав пакет из другой ветки, вы обнаружите, что опубликовать его не можете. Такое вот небольшое ужесточение дисциплины, которое на самом деле очень сильно облегчает поддержку дистрибутива.
-
Наши инструменты в дистрибутиве Debian
В компании «НТЦ ИТ РОСА» разрабатывается множество инструментов для автоматизации тестирования различных компонентов ОС. Большинство из них мы делаем достаточно универсальными и публикуем их под свободной лицензией GPL для того, чтобы поделиться наработками с Linux-сообществом. Согласно отзывам, за время нашего существования эти инструменты нашли свое место среди повседневных средств разработки у нескольких сотен разработчиков системных библиотек по всему миру, а также у мейнтейнеров десятков дистрибутивов Linux.
На этот раз наши инструменты пришли и в Debian-сообщество. На конференции DebConf14 был доклад (см. видео доклада ACC for abi breaks), посвященный опыту использования наших инструментов для разработки дистрибутива Debian. В докладе были освещены такие инструменты, как ABICC, Upstream Tracker, ABI Dumper, API Sanity Checker и др. На основе инструмента ABICC разработчиками Debian был создан адаптированный к Deb-пакетам инструмент dh-acc.
Это уже не первый раз когда наши наработки упоминают на конференциях. Например, в 2013 году ведущий разработчик Qt Thiago Macieira рассказал на конференции LinuxCon о поддержке бинарной совместимости библиотек со ссылкой на инструмент ABICC в качестве основного средства тестирования (см. видео доклада Binary compatibility for library developers).
-
Наш Pkgdiff используется на fossies.org
Недавно в популярном проекте Fossies.org начали использовать наш инструмент Pkgdiff для массового анализа изменений в исходных кодах тысяч (!) пакетов. На главной странице теперь есть раздел Fossies Diffs. Список проанализированных пакетов можно найти по ссылке.
Инструмент Pkgdiff был разработан в 2011 году для классификации и контроля изменений в пакетах при разработке дистрибутивов РОСЫ. В 2012 году после продолжительного внутреннего тестирования исходный код был открыт для сообщества и приобрел заметную популярность. Ранее среди известных проектов, использовавших этот инструмент, были Glibc и Stellarium.org.
В РОСЕ инструмент используется не только мэйнтейнерами пакетов, но и в нашем популярном сервисе Linux Upstream Tracker для визуального просмотра изменений в пакетах некоторых библиотек (например, OpenSSL).

На странице каждого пакета теперь есть ссылка на отчеты Pkgdiff ("Diffs report") рядом с отчетами Doxygen:

Список отчетов, к примеру, пакета mesa:

Отчеты pkgdiff для mesa, классификация файлов пакета:

Списки файлов в разных классах и коэффициенты изменений:

Визуализация изменений (с помощью wdiff, rfcdiff):

-
ABF - новый бэкенд, новый дизайн и новые возможности
Как наверняка заметили пользователи ABF, у нашей системы сборки недавно сильно изменился внешний вид. Но вряд ли многие догадываются, что изменение дизайна — это не самоцель, а следствие серьезных изменений в структуре бэкенда ABF.
В частности, ABF теперь использует популярные фреймворки Bootstrap 3 и AngularJS. Переход на них был продиктован отнюдь не данью моде, а необходимостью избавиться от самописных наработок, перенеся тем самым ряд задач с разработчиков ABF на разработчиков фреймворков и позволив первым больше внимания уделять функционалу, связанному с непосредственными обязанностями ABF — разработкой и сборкой проектов под Linux. Подобная необходимость замены собственных велосипедов на стандартные решения рано или поздно встает перед многими проектами, и мы решили, что лучше с этим процессом не затягивать — пока все еще помнят, как все самописные вещи устроены и работают.
Процесс переезда на новые технологии занял более полугода, и в начале февраля мы сочли качество нового ABF достаточным для «выхода в свет» и представления широкой публике.

Визуальные изменения в интерфейсе серьезны, а глаз разработчиков за полгода общения с ним успел замылиться, поэтому новые идеи и комментарии от пользователей относительно внешнего вида приветствуются. Если у вас есть более-менее глобальные предложения, то лучше оформлять их в виде идей на страничке ABF Ideas, а сообщения о мелких недочетах лучше отправлять с помощью соответствующей формы на сайте.
Помните, что визуальные изменения дизайна — это только вершина айсберга, внутренности ABF также подверглись серьезной переработке. Несмотря на обилие внутренних тестов (мы придерживаемся принципов Behavior Driven Development и пишем тесты на RSpec), мы допускаем возможность наличия ряда ошибок и регрессий. К слову, за первый день эксплуатации нового ABF мы по запросам пользователей уже исправили проблемы с подключением контейнеров, пересозданием сборок, отправкой pull request’ов через веб-интерфейс, автоматическим выбором целевых репозиториев в некоторых специфических случаях и несколько других проблем, не смертельных с точки зрения функционала разработки и сборки, но неудобных и неприятных с точки зрения пользователя Web-интерфйеса.
Есть и несколько новых заметных изменений в новом интерфейсе ABF по сравнению с предыдущим:
- для времени и даты теперь предпочтительным является отображение абсолютного значения — 2014-06-10 14:02. Относительное значение отображается рядом, если позволяет место — 2014-06-10 14:02 (8 months ago);
- на странице Advisories появилась колонка с именем проекта — очень полезно, так как по тексту некоторых advisories сложно понять, к какому пакету/проекту они относятся;
- если проект является форком другого, то это будет отображено в меню на странице проекта:

- если в строке браузера ввести ссылку на несуществующий проект, то отобразится страница 404, но содержимое строки адреса очищено не будет (как это было в старом ABF, когда в строке адреса вы получали http://abf.io/404.html). Так что если вы ошиблись парой символов, то исправить это можно гораздо проще;
- при создании новой сборки содержимое колонки «Build for platform» динамически изменяется в зависимости от того, что выбрано в поле «Save to repository». Например, если мы собираем пакет для репозитория rosa2014.1/main, то ABF разрешит подключить только репозитории платформы rosa2014.1:

Наконец, главное нововведение в новом ABF — это проекты-алиасы («aliases»), имеющие общий Git-репозиторий. То есть теперь можно иметь два проекта vanya/old_project и petya/new_project с различными описаниями, владельцами, привязками к платформам/репозиториям и так далее, но с общим Git-репозиорием. Так что все изменения, которые происходят в коде проекта vanya/old_project автоматически попадают в код petya/new_project.
Создать проект-алиас можно нажав на кнопку «Fork» и выбрав соответствующую опцию — если у вас достаточно прав, но вам предоставят на выбор возможность склонировать проект либо сделать ему алиас. Однако помните, что для создания алиаса необходимо иметь права не только на создание проектов в целевой группе, но и иметь права администратора в группе, к которой принадлежит исходный проект. Посмотреть список алиасов проекта можно на странице его свойств. При удалении одного из алиасов Git-репозиторий не удаляется, пока есть хотя бы один привязанный к нему проект.
Пользоваться этой новой возможностью надо с аккуратностью — ведь если забыть о существовании алиаса, то можно невзначай навредить соседнему проекту. Впрочем, предназначен новый функционал в первую очередь для разработчиков дистрибутивов (у которых порой возникает необходимость автоматически синхронизировать изменения в сотнях и даже тысячах проектов из разных платформ), и большинству пользователей вряд ли пригодится.
|
Конференции, мероприятия и прочая движуха
Ну и для всех более-менее связанных с IT будут интересны наши обзоры и видеозаписи IT-конференций. Кстати, в нашей медиатеке уже девять сотен докладов. Заходите, смотрите, комментируйте.
-
Компания "РОСА" участвует в слете ИТ-специалистов IT CAMPUS
25-27 июля 2014 года ИТ-специалисты страны соберутся на самом масштабном профессиональном мероприятии лета для полного погружения в информационные технологии и отдыха в кругу единомышленников
В мероприятии нового формата — IT CAMPUS — примут участие ИТ-профессионалы различной специализации: разработчики ПО, специалисты в сфере веб- и мобильных технологий, ИТ-инженеры, системные администраторы, руководители ИТ-подразделений, сотрудники технической поддержки и другие специалисты ИТ-отрасли.
На мероприятии с докладом выступит президент и генеральный конструктор компании "РОСА" Владимир Рубанов. Тема выступления — "От "дикого" СПО - до сертифицированных систем промышленного качества". "Феномен свободного программного обеспечения (СПО) известен давно. Начинался он как инициатива энтузиастов, однако за последнее десятилетие произошел кардинальный скачок в использовании СПО-решений в реальном бизнесе. Большая часть Интернет, включая такие известные сервисы как Google, Facebook и Twitter, работают на СПО; дошло и до того, что крупнейшие фондовые биржи и банки доверяют огромные деньги Linux-серверам. Однако многие по-прежнему считают, что СПО — это продукт творчества "свободных художников", на который нельзя полагаться. Истина же где-то рядом, и одно СПО другому СПО, действительно, рознь. В докладе обсудим, как можно совмещать свободное творчество и бизнес, открытость и надежность, а также — как во всем этом процессе правильно поучаствовать", — рассказывает Владимир Рубанов.
IT CAMPUS проводится на природе (центр отдыха и туризма «Высокие берега», Калужская область) и включает как насыщенный конференционный блок, который пройдет в три параллельных потока, так и тематическую развлекательную программу. Цель конференции — избегая рекламы, дать исключительно полезную практическую информацию о новейших тенденциях в сфере информационных технологий. Конференционная часть состоит из докладов, дискуссий и мастер-классов. Спикеры — представители крупных ИТ-компаний — затронут темы управления проектами, разработки ПО, веб- и мобильных приложений; обсудят тенденции в сфере облачных технологий и виртуализации; коснутся вопросов управления ИТ-ресурсами и бизнес-процессами предприятий; уделят внимание информационной безопасности.
Параллельно с конференционной частью, участников мероприятия будут ждать соревнования по информационной безопасности – Capture the flag, турнир по легендарной игре Quake, ярмарка вакансий от ведущих IT-компаний и еще много всего интересного. Организатором IT CAMPUS является ГК Softline, партнерами стали Microsoft, «Лаборатория Касперского», VMWare, HP, EMC, Veeam, Netwrix, Академия Информационных Систем.
IT CAMPUS заявляет: ИНФОРМАЦИОННЫЕ ТЕХНОЛОГИИ ДОЛЖНЫ БЫТЬ ДОСТУПНЫ ВСЕМ!
Стоимость участия в этом грандиозном мероприятии составит всего 200 рублей.
С подробной программой мероприятия и условиями участия можно ознакомиться на сайте www.itcampus.ru.
-
Курсы "РОСЫ" - на сайте PC Magazine RE

Опубликована trial-версия курсов Сертифицированного администратора ОС РОСА «КОБАЛЬТ»
На сайте популярного журнала PC Magazine/RE опубликованы несколько ознакомительных уроков и базовый тест, помогающий получить представление о платном курсе «Сертифицированный администратор ОС РОСА «КОБАЛЬТ».
Сдав контрольный тест курса, вы можете принять участие в розыгрыше USB-флэш, 32 Гбайт, USB 3.0 (2 шт. в течение каждого месяца). Успешная сдача подтверждается также сертификатом (в электронном виде, PDF).
Содержание курса:
- Настройка DNS в режиме кэширования
- Разрешение использования подключаемых накопителей для обычных пользователей
- Включение аудита для отслеживания использования приложений
… Подробнее, см на странице курса.
|
-
«НТЦ ИТ РОСА» на «Инфобереге 2014» — итоги участия
Руководство «НТЦ ИТ РОСА» посетило Алушту в рамках участия в XIII всероссийской конференции «Информационная безопасность. Региональные аспекты. ИнфоБЕРЕГ-2014».
Наибольший интерес участников конференции вызвала тема импортозамещения, а одним из самых популярных стал доклад президента и генерального конструктора «НТЦ ИТ РОСА» Владимира Рубанова «От открытого кода — к отечественным сертифицированным системам».
Заменить импортное ПО на написанное «с нуля» российскими программистами во всех сегментах — утопия. Однако есть возможность быстрого рывка к технологической независимости за счет использования открытых свободных технологий, на развитие которых у нас есть все технические возможности и юридические права даже при угрозе самых жестких санкций. Однако само по себе открытое ПО бесполезно без создания локальной инфраструктуры его разработки и наращивания локальной компетенции специалистов. Компания «РОСА» занимается задачей построения такой независимой инфраструктуры и экспертизы с момента основания. Результаты вылились в линейку российских операционных систем, которые могут поддерживаться и развиваться даже в условиях международной изоляции. В докладе мы поделились этим опытом и предложили коллегам масштабировать данную модель для обеспечения технологической независимости в других сегментах — рассказывает Владимир Рубанов, президент и генеральный конструктор «НТЦ ИТ РОСА».
Подробнее…
Основной акцент в выступлении В.Рубанова был сделан на критическом значении различного программного обеспечения (ПО) для независимости и безопасности страны. Были обозначены три принципиальных подхода к выбору ПО:
- во-первых, можно использовать зарубежное программное обеспечение;
- во-вторых, создавать «с нуля» отечественные программные средства полностью силами российских специалистов;
- в-третьих, создавать отечественные программные средства на основе комбинации открытых и свободных международных компонентов с собственными разработками.
Как отметил В.Рубанов, использование импортного ПО — самый легкий вариант, и в этом его плюс — не нужно ничего делать самим, достаточно оплатить зарубежный продукт. Однако негативные последствия в условиях потенциальных санкций со стороны зарубежных производителей многочисленны: отключение поддержки обновлений производителя (в том числе по безопасности), невозможность самостоятельной доработки и внесения исправлений, вероятность отзыва лицензий.
Если рассматривать вариант полной разработки «с нуля» программных средств на территории России, положительным моментом является, несомненно, полный контроль на всех стадиях создания программного решения. Однако есть и ряд минусов: процесс долгий, дорогостоящий, можно столкнуться с нехваткой специалистов в данном вопросе и не избежать изоляции от зарубежного ИТ-сообщества, что ведет, в конечном счете, к снижению качества продукта.
«Мы видим наибольшую выгоду для государственных и коммерческих структур в использовании третьего из вышеперечисленных вариантов: адаптацию и доработку программных решений, основанных на открытом программном коде. Данный способ позволяет легитимно и бесплатно использовать готовые наработки многих тысяч ИТ-специалистов, сохранив при этом необходимый контроль над разработкой, включая возможности по доработке, исправлению ошибок, выпуску различных вариантов исполнения программного продукта. Наличие полных исходных кодов и средств разработки вместе с локальными специалистами обеспечивает технологическую независимость. В „мирное время“ данный способ позволяет сохранять связь и синергию с зарубежными разработчиками, дорабатывая ПО совместными усилиями и разделяя затраты. Именно такой подход позволяет выстроить трамплин для обеспечения технологической независимости, не исключая, по мере наличия ресурсов, постепенного углубления степени контроля, в том числе за счет увеличения доли собственных разработок и более тщательного анализа существующих компонентов», — подчеркнул президент и генеральный конструктор «НТЦ ИТ РОСА».
В завершении выступления Владимир в очередной раз развенчивает мифы по поводу свободного ПО. «Открытый код сам по себе не означает безопасное ПО. Однако открытость делает возможным более глубокий анализ на наличие уязвимостей и недекларированных возможностей (прежде всего, с помощью автоматизированных средств) и проведение независимой от производителя ПО доработки и исправления ошибок, — считает Владимир Рубанов. — Технологическая независимость заключается не в изоляции от мирового сообщества в мирное время, а в потенциальной способности страны обеспечить функционирование существующих ИТ-систем и продолжить их развитие силами локальных специалистов в гипотетических условиях форс-мажора на международной арене».
Всего в конференции приняли участие более 200 руководителей и специалистов по информационным технологиям, информационной и экономической безопасности из 40 субъектов РФ, представляющих телекоммуникационную отрасль, предприятия топливно-энергетического комплекса и промышленности, финансовые учреждения и другие компании с развитой ИТ-инфраструктурой. «НТЦ ИТ РОСА» готова и в дальнейшем поддерживать данное мероприятие участием экспертов ведущего отечественного ИТ-разработчика.
Предлагаем подробнее ознакомиться с презентацией Владимира Рубанова:




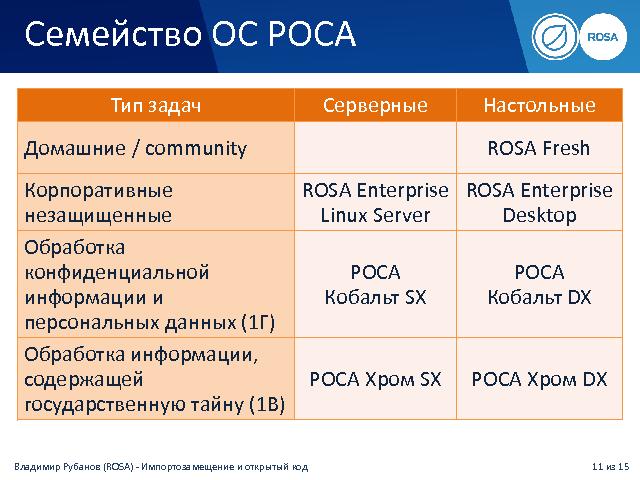


-
Обзор юзабилити-конференции ProfsoUX-2014
... to delete
-
Официальная новость по итогам IT Campus 2014
Подведены итоги масштабного мероприятия для ИТ-специалистов, прошедшего 25-27 июля 2014 года в Калужской области.
ITCampus – это новое мероприятие для «айтишников» разной специализации: разработчиков программного обеспечения, web-разработчиков, системных администраторов, «гуру» информационной безопасности и даже digital-маркетологов. Целью был сбор представителей ИТ-отрасли, объединенных девизом: «Информационные технологии должны быть доступны всем».
В 2014 году IT Campus посетили более 1500 участников из десятков городов России и некоторых стран СНГ и Балтии, в их числе — и представители компании «РОСА». Основное внимание организаторы уделили конференционному блоку, который проводился в три параллельных потока на протяжении двух дней. Спикеры сделали более 40 докладов, провели несколько мастер-классов и панельных дискуссий. В числе вызвавших наибольший интерес аудитории выступлений можно отметить: «Взломать за 60 секунд» Андрея Масаловича из компании «Инфорус», «Жизнь после Сноудена» Виталия Федорова из «Лаборатории Касперского», «Что такое PostgreSQL?» Олега Бартунова (ведущий разработчик PostgreSQL), «IT-стартапы в сфере B2B» Рустема Хайретдинова (акционер InfoWatch и владелец Appercut), доклад Cтаса Фомина («РОСА») и множество других выступлений.
Директор по технологиям компании «РОСА» Стас Фомин выступил ведущим секции по Open Source (свободному ПО, СПО), где в интерактивном взаимодействии с участниками были развенчаны мифы, связанные с этой моделью, обсуждены тренды в мире СПО. Стас рассказал о проблемах, с которыми часто сталкиваются производители продуктов на основе открытого кода и системные администраторы таких систем, а также уделил внимание проблемам безопасности СПО и особенностям для коммерческих проектов.
Вопросов к докладчикам и тренерам у участников возникло так много, что дискуссии вышли за пределы запланированной сессии. Для неформального общения была организована специализированная зона в отдельном шатре, где обсуждение можно было продолжить в более комфортных условиях.
По завершении докладов и мастер-классов «жители» IT Campus могли принять участие в развлекательной программе, включающей спортивные соревнования, катание на сигвеях и квадроциклах, профессиональные конкурсы CTF и турнир по Quake 3. Кроме того, можно было посетить ярмарку ИТ-вакансий, концертную программу, посмотреть на гигантский костер и праздничный салют.
IT Campus прошел в живописном месте на берегу Оки. Проживание участников было организовано в палаточном городке. При этом гостями была отмечена хорошо подготовленная инфраструктура: наличие парковки для автотранспорта, санитарных зон, душевых, электричества и Интернета. Помощь в работе лагеря оказывали охрана, медики, представители УВД и МЧС, а также волонтеры.
Партнерами IT Campus 2014 стали «Лаборатория Касперского», Microsoft, EMC, HP, Veeam, Acronis, Develonica, Luxoft, "РОСА" и другие. Помощь в организации конференционного блока оказала «Академия Информационных Систем».
Фотоотчет IT Campus доступен по ссылкам: День первый; День второй.
Впечатления Стаса Фомина об участии в мероприятии Вы также могли прочитать в «Точке РОСЫ»
-
ITCampus-2014
В прошедшие выходные наши были на ITCampus-2014, гибриде традиционного слета сисадминов под Калугой и конференции под открытым небом. Два в одном — образовательные тренинги и развлечения, серьезные лекции и пьяные разговоры, компьютерные технологии и «солнце воздух и вода — ваши лучшие друзья».
IT-пикники — явно перспективный конференционный тренд, «Educaiment=Education+Entertainment», едешь на отдых с семьей (опционально) и друзьями, оформляешь как командировку на конференцию (да, там ставили штампы на командировочные удостоверения) и сам выбираешь баланс между докладами/тренингами и конкурсами мокрых футболок.
Тут же еще был баланс между диким отдыхом и цивилизацией: с одной стороны — палатки-костры-романтика, с другой — тут был постоянно работающий кемпинг, с туалетами, умывальниками, столовой-буфетом, стационарные шатры для докладов и развлечений, а для костра были специально заготовлены дрова. Плюс не очень навязчивая охрана и видеонаблюдение, дежурящая скорая и даже пожарная машины.

К сожалению, именно по пожарной части случился факап — не повезло одному «глазастому мерседесу» — внезапно загорелся, скорее всего, от травы (катализатор или выхлопная труба…), и несмотря на то, что пожарная машина была в сотне метров, пока доехали, пока размотали рукова, пока выяснили, что нет воды… Увы. Хорошо хоть без взрывов и жертв. Зато это прекрасно объясняет, зачем организаторы жестко загоняли почти все машины на специально выделенное для парковки место.
Была и куча развлечений — каталово на сегвеях и квадрациклах, игровой шатер с настольными и компьютерными играми, XBoxы, теннисный стол и аэрохоккей, концерты групп разной степени бодрости и известности, дискотеки, бесплатные энергетические напитки с сомнительными ингридиентами, хоровод вокруг костра и мощный салют — в общем, даже если вдруг доклады утомили, вполне можно было развлечься или развлечь семью. Для атмосферы посмотрите фотографии+[7]+[8] или одноминутный видеоролик.
Я же, Стас Фомин, поехал порассказывать-поговорить про Open Source примерно со следующей программой:
- «Open source для тех, кто в танке». Вводим словарик, изгоняем ментальные вирусы (FOSS ≠ FreeSoft ≠ OSS, открытость ≠ бесплатность, OpenSource ≠ OpenCore, и т.п.).
- «Тренды в мире OSS». Ушла ли романтика? Коммунизм, капитализм или just for lulz? Идейные партизаны или наемники корпораций? Каннибализм — ест ли open source-рынок нишевых проектов и едят ли его стартапы-сервисы-freeapps из storов? Дикий мир OSS и островки цивилизации. Статистика, цифры, графики.
- «Проблемы производителей OS» — в чем PROFIT? Как монетизироваться? Продаем людей, машинное время или воздух? Оптимальные процессы — «Собор или базар»? Есть ли смысл?
- «Проблемы разработчиков OSS» — дедовщина в сообществах, синдромы NIH, «сад расходящихся тропок форков», архитектура OSS — эволюция или инженерия? В чем фан, в чем профит, есть ли смысл.
- «Потребители OS» — Кто все эти люди? В чем PROFIT? Как мерятся длиной Total Cost Ownership? OSS и качество — «Красавица или чудовище»? OSS и безопасность — «Недремлющие тысячи глаз или у семи нянек дитя без глазу»? OSS для коммерческих проектов? Снимает ли OSS софтозависимость, или тут просто «тоньше игла и дешевле первые дозы»? OSS для сисадминов…
- «OSS для юриста-любителя» — зоопарк OSS-лицензий, легальный статус в РФ, что выбрать для своего OSS, как не подхватить вирус от чужого OSS.
Разумеется, без приключений не обошлось. Я, конечно, отнесся к своей миссии весьма ответственно, продублировал оборудование, взял с собой два ноутбука, кучу запасных аккумуляторов, кучу переходников-кабелей, проектор, складной экран, внешний монитор, переносной мегафон … ну в общем, все, чтобы доклад состоялся, даже если выключится электричество.
И стартовав в 10 утра, был уверен, что моему выступлению в 17 ничего не угрожает (если бы в дороге сломалась машина, был запасной план — бросить и поехать на такси). Поехал по заранее распечатанным картам проложенного яндексом маршрута. Да, проспал самое утро, Москва-пробки-ад и все такое, но все было ОК, пока в середине пути я не решил, что ехать по распечаткам как-то олдскульно и не труѣ, и не решил позвать гугл-навигатор[28]. Который, найдя единственную деревню Воронино в Калужской области погнал меня туда, а я выключился и доверился компьютерному разуму. Километров через 150 я забеспокоился — ибо яндекс-путь должен был быть 200 км, а я уже проехал почти 300 и конца этому было не видно… Я даже названивал организаторам с просьбой проверить, точно ли нет других «д.Воронино» в Калужской области, и меня заверили, что она единственная и туда они приехали именно гугл-навигатору. Большой карты у меня не было… проблем хватало и так — сдох прикуриватель, и жизнь в смартфоне я поддерживал, разряжая взятую с собой кучу ноутбуков… В результате, я обнаружил себя за полтора часа до начала выступления в деревне Воронино, которая находилась от правильной деревни в паре часов езды. Дальше я сделал умное — вспомнил, где на трассе был нормальный 3G, доехал туда, поставил Яндекс.Навигатор и погнал изо всех сил — у меня старая короткая Нива, уверяю, что это было экстремально. Телефон разряжался и перегружался, показывая мне, что я либо успею в упор, либо опоздаю на полчаса[29] Я менял «заряжающие ноутбуки» и гнал, слепо доверяя яндексу. Яндекс тоже дал прикурить — в конце пути он навел меня на изрытую грунтовую дорогу (все опрошенные в лагере, наткнувшись на нее, свернули обратно, я гнал по ней, не снижая скорости) — в результате отвалилось несколько хомутов, движок сосал пыль вне фильтра, и вроде теперь куда-то уходит охлаждающая жидкость… Гнал, потом бежал от парковки, забыв выключить фары (да, разрядил аккумулятор).
Но успел, в упор. И несмотря на вечер, фигово видный в прозрачном шатре проектор, три с лишним часа мы с народом поговорили. Хотя я считал, что вроде все темы вроде как достойны Капитана, все-таки выяснилось, что для многих почти все было в новинку… Были и нетрезвые критично настроенные участники, и мне пришлось отвечать не только за «опенсорс», но и за госорганы и прочую политику… в общем, было весело, wish you were here[30].
Если кто ждал каких-нибудь слайдов, не ждите — многочасовой разговор по многокилобайтному майндмапу все равно не передается. Так что могу предложить только некий impression, а так как в соцсетях читают только написанное на картинках, оно будет таким:

На самом деле, не все удалось обсудить — там у меня была большая тема с юридическими тонкостями зоопарка open source-лицензий, но уже смеркалось, и народ хотел ужинать и смотреть на горящий мерс… Так что про эти темы, может быть, еще как-нибудь поговорим на другом мероприятии.
В любом случае, я свой долг выполнил, тут вроде хвалили.
Далее у меня был нетворкинг с приютившей меня дружной командой сисадминов, от которых реально узнал много нового и получил неожиданный опыт (век живи, век учись!).
Слушал также доклады из незнакомых областей — например, была секция спамеров SMMщиков, гордящихся тем, что честного Интернета больше нет, и все отзывы написаны командами специально обученных людей (шизофрения, наверно, помогает в этой ужасной профессии).
В обычной жизни мне так хочется всех их удавлить… но когда выступает красивая девушка[31], моей решимости на это не хватило, только мягко указал на неэтичность и неэкологичность всего этого.
Если вынести за скобки бытовуху и вкусовщину и сконцентрироватся именно на конференционной части, то конструктивные предложения следующие:
- Для нормального доклада с визуальной частью надо решить проблему с засветкой в прозрачных шатрах: черные или зеркальные навесы над экранами и т.п., либо от проекторов перейти к плазмам, либо вообще без проекторов.
- Микрофоны-динамики-усилители были, но нужны микрофоны с прищепками или гарнитурой — руки докладчикам часто нужны.
- Я пообщался с основной ЦА — матерыми региональными сисадминами,
- от вендоров они бы хотели не маркетинговых обзоров, а реальных мастер-классов, в духе «конкретно решаем такую-то проблему, по шагам».
- они готовы смотреть такие доклады в записи (вдруг придется разрываться между треками?) — и как раз такие мастерклассы можно записать и смонтировать дешево — скринкаст+звук с микрофона.
- а еще они просили у вендоров больше конкретной халявы — не тупой сувенирки, а реальных лицензий на продукты на год и т.п.
- Многие участники слета вполне опытны и могут неплохо рассказать редкую тему — тут надо было на сделать секцию open space, где заявить, а потом рассказать свою тему мог бы любой участник. Это было бы реальное вовлечение.
- Интересно, как бы такой educaiment можно было бы провести зимой… В свое время мы провели такой слет-конференцию-
разв…отдых в зимнем Египте (цены были копеечные). Может как-нибудь повторить?
В любом случае, если вы там были (и даже не были) и у вас есть идеи по конференционной части на будущее → свяжитесь с организатором, ну, или жалуйтесь в группах VK и FB.
Но не мой доклад заслужил призы от организаторов. А наш доблестный админ, Сергей Соколов, который получил приз зрительских симпатий на конкурсе мокрых футболок. Да, это звучит немного странно «—Это же был конкурс для детей?! —Да, и Гомер их всех сделал»©, но факт.

Завидую. Вот это, видимо, и есть настоящий опенсорс, который всегда нужен людям.
-
Приглашаем на ROSS 2015 — Russian Open Source Summit

Приглашаем посетить экспозицию «НТЦ ИТ РОСА» в рамках ROSS 2015.
Организатором Саммита традиционно выступает ведущий ИТ-еженедельник PC Week/RE. Ожидается, что в работе ROSS 2015 примут участие порядка 400 руководителей и специалистов из коммерческих компаний разных отраслей и госорганизаций.
ROSS 2015 призван осветить качественно новую роль Open Source как основного движителя развития современных информационных технологий в эпоху облаков, мобильности и социальных сетей.
Только идеология Open Source сегодня позволяет реализовать на практике концепцию универсальной технологической платформы, обеспечивающей интероперабельность информационных систем и сервисов различных производителей.
В качестве ярких примеров здесь можно привести Open Source проекты облачной операционной платформы OpenStack, программно-определяемых сетей (SDN), контейнерных технологий автоматизации развёртывания и управления приложениями в среде виртуализации (Docker, Rocket и др.).
Другим фокусом конференции станет анализ ситуации в области Open Source в России. Будут представлены новые отечественные открытые проекты, показана роль отечественных разработчиков в международных Open Source проектах.
«НТЦ ИТ РОСА» поделится опытом внедрения СПО в российских организациях.
Одной из ключевых тем станет обсуждение роли Open Source как механизма эффективного импортозамещения информационных технологий в условиях западных санкций и оптимизации корпоративного ИТ-бюджета.
В программе форума — доклады экспертов «НТЦ ИТ РОСА», консультирование и демонстрация защищенных программных продуктов российского производства.
На пленарном заседании представители органов государственной власти, ответственные за информатизацию, представят свои оценки состояния дел и перспектив государственной подержки Open Source. Ассоциация РАСПО представит новое коллективное видение сообщества отечественных компаний, занимающихся разработкой Open Source решений и их внедрением, путей развития Open Source в России.
Президент и генеральный конструктор «НТЦ ИТ РОСА» выступит с докладом на тему: «Технологическая независимость и международная кооперация: совместить нельзя изолироваться». В докладе будут раскрыты примеры организации крупных международных проектов разработки ПО по открытой модели «разделяемые затраты, общий результат» с анализом преимуществ и рисков, которые получают участники с различных точек зрения — технологической, финансовой, ресурсной, политической и др. В качестве основного вопроса будет рассмотрена возможность одновременного совмещения технологической независимости страны с международной кооперацией - как в рамках открытых проектов, так и с компаниями-производителями закрытых западных продуктов. Отдельно будет представлена на обсуждение идея Минсвязи по созданию «Российского фонда развития программного обеспечения» со схожей предполагаемой моделью работы.
- Подробная программа мероприятия: http://www.pcweek.ru/foss/conference/program/
ROSS 2015 состоится в Event-холле «ИнфоПространство» по адресу: г. Москва, 1-й Зачатьевский пер., д. 4, м. Кропоткинская, м. Парк Культуры. (См. схему проезда).
Начало регистрации — 9:30, начало конференции — 10:00, окончание — 18:00.
Для специалистов участие бесплатное при условии подтверждения от Оргкомитета. Регистрация на мероприятие: http://www.pcweek.ru/foss/conference/registration/
Если вы никогда раньше не были на ROSS, предлагаем вам наши обзоры прошлогодних ROSSов: 2013, 2014 и видеозаписи в нашей медиатеке: ROSS-2013, ROSS-2014.
-
Приглашаем на конференцию «Свободное программное обеспечение в Высшей Школе»
24-25 января 2015, в Переславле-Залесском пройдет традиционная и юбилейная, уже десятая, конференция «Свободное программное обеспечение в Высшей Школе». Организует конференцию ALT Linux, но мы также регулярно помогаем — например, снимаем-монтируем-публикуем видеоматериалы ([9], [10]), не говоря уже о выступлениях наших сотрудников ([11], [12], [13]).
В этом году, от нас будет Денис Силаков, с рассказом об опыте применения нашей ROSA FRESH в исследовательской химической лаборатории, и Стас Фомин, продвигающий очередное свое безумное изобретение — эффективную систему проверочных тестов, ну и как обычно, будет снимать видео.

В целом, как следует из названия конференции, доклады все крутятся вокруг опенсорса и/или образования, иногда с уклоном в чисто научно-технические штуки, иногда в чистый cофт, иногда — в политику. Были и зажигательные доклады, и откровенно скучные, глубоко-философские и четко-практические…, доклады конкретно-практические и академические с названием в три абзаца, из которых все равно ничего не понятно. Были и практики из индустрии, ректоры и преподаватели ВУЗов, чиновники из министерств, ученые, разной степени безумности… … много и просто, по старой советской привычке, регистрировали для галочки доклад с десятком соавторов, и вовсе не приезжали…
Наверно, чтобы было понятно, приведем краткую авторскую классификацию за прошедшую пару лет (мог в процессе классификации что-то и потерять):
- Образование — философско-политические вопросы
- Сегодняшние проблемы высшего образования в России (Сергей Абрамов)
- О необходимых знаниях и умениях для программистов суперкомпьютеров (Николай Непейвода)
- Можно ли информатика, обучавшегося традиционному программированию, переучить на алгебраическое?
- О подготовке специалистов в области ПО
- ЕГЭ по информатике — итоги 2012 г. (Михаил Ройтберг)
- СПО и оргпроцесс в ВУЗах
- Информационная система УГП имени А.К.Айламазяна, как учебная среда и учебное пособие (Сергей Абрамов)
- Технические и организационные аспекты внедрения СДО Moodle в образовательной организации (Алексей Дьяченко)
- Курсы переподготовки преподавателей ИХБТ НИУ ИТМО на базе Moodle
- Мобильный клиент оперативного доступа к ИАСУ МАИ
- Интеграция мобильных устройств в составе учебного класса общеобразовательного учреждения
- Опыт использования свободного программного обеспечения в Московском Государственном Индустриальном Университете
- Проблемы и решения подключения учреждений профобразования к ФИС ЕГЭ и приёма
- Использование СПО в образовании (Виктор Иванников)
- Образование и индустрия
- Linux-образование — симбиоз ВУЗов, коммерческих компаний и LUG (Денис Пынькин)
- Программа Google Summer of Code как способ привлечения студентов к разработке СПО проектов (Дмитрий Казаков)
- РОСА и НИУ ВШЭ — опыт сотрудничества на ниве обучения студентов (Денис Силаков)
- Что может предложить Альт Линукс для образования (Андрей Черепанов)
- Студенты и свободные проекты - опыт Red Hat Identity Management (Александр Боковой)
- Задачи подготовки и переподготовки инженерных кадров в условиях расширения использования СПО в различных отраслях промышленности
- СПО для эффективного преподавания
- Магия пера или эффективная свобода преподавания со стилусом (Стас Фомин)
- SeminarAssembler — эффективная съемка, монтаж и публикация лекций и конференций (Стас Фомин)
- Особенности использования виртуализованных окружений, внедренных в презентационные материалы (Дмитрий Костюк)
- Распределённая система автоматизированного тестирования
- СПО в отдельных дисциплинах
-
- Программирование и IT
- Использование языка программирования Python в качестве базового при обучении специалистов
- Кумир 2.0. Компилятор и среда выполнения (Виктор Яковлев)
- Ускорение выполнения Кумир-программ с помощью LLVM (Виктор Яковлев)
- Использование компилятора gcc и библиотеки MathGL в курсе «Вычислительная техника и алгоритмические языки» (Евгений Алексеев)
- Применение виртуальных машин в составе иллюстрированных обзоров истории программного обеспечения (Дмитрий Костюк)
- Обучение принципам построения ядра операционных систем на практике (Алексей Хорошилов)
- Роботы
- Роботы в образовании или что такое «РоботоБУМ» (Игорь Воронин)
- Среда КУМИР для изучения алгоритмов управления сенсорными сетями роботов (Виктор Воронин)
- Образовательный проект по робототехнике УМКИ на основе СПО (Игорь Воронин)
- Свободное программное обеспечение для NXT (Валерий Руденко)
- MISC
- Использование свободного ПО в учебном процессе - разработка, внедрение, методика преподавания (Андрей Михеев)
- Методика обучения процессному подходу к управлению предприятием на основе СПО и ее апробация в НИТУ МИСиС
- Дипломное проектирование на СПО (Владимир Симонов)
- Open-source в научных и околонаучных исследованиях
-
- Статический анализ кода
- Построение универсального представления графа потока управления для статического анализа исходного кода (Алексей Пустыгин)
- Прототип инструмента для анализа графа потока управления открытых исходных текстов С и С++ на основе универсального представления
- Проект технологии извлечения знаний из исходных текстов на языках С++ и Csharp с использованием общего промежуточного представления
- Выделение типов в универсальном классовом представлении для статического анализа исходного кода
- Биология
- Гидродинамика
- Анализ текстов
- Применение онтологического подхода для анализа текстов в облачном контент-репозитории C2R (Алексей Костарев)
- Morpheus — морфологический плагин к браузеру FireFox (Михаил Быков)
- Параллельные вычисления
- Сравнительное исследование производительности математических пакетов и библиотек на многоядерных процессорах
- Эффективность различных технологий распараллеливания при решении вычислительных задач (Евгений Чичкарев)
Встречалось и совсем непонятное: Поиск минимальных существенных замкнутых классов в Pk (Владимир Атаманов)
- Свободный софт (практически без связи с образованием)
- СПО. Кризис среднего возраста? (Анатолий Якушин)
- Krita — графический редактор для художников (Дмитрий Казаков)
- Управление инфраструктурой предприятия с FreeIPA (Александр Боковой)
- Свободные программы в проекте ГИС областного масштаба (Иван Хахаев)
Пройдите по ссылкам — там будут и аннотации, и тезисы, и развернутая инфографика слайдов, видео, продублированное на vimeo, youtube и местами отдельными файлами, тематическая классификация и информация об авторах. Кстати, часто это было самым сложным моментом при публикации — понять кто выступал: докладчики почему-то не представлялись, в программе доклада по советской привычке заявлен десяток соавторов, непонятно кто из них выступал, причем по дурацкой традиции, в программе только фамилии с инициалами, дурацкие ФИО, по которым не только фиг что нагуглишь, но даже пол автора понять нельзя. Приходилось тратить часы, на поиски вменяемой информации об авторах. Докладчики, еще раз призываю — читайте мою памятку докладчику, вы сделаете мир лучше.
Можно почитать и обзоры конференции[32]: [14], [15], [16], [17], вот, как-то пощелкал малохудожественные фотки.
В целом, видно, что выступающие повторяются из года в год, а хотелось бы и свежих лиц, и роста аудитории. Поэтому, агитирую приехать.
Доклады — не главное:
- Это вполне можно считать рекреационным образовательным туризмом:
- Конференция в центре Переславля-Залесского, города, который в 19 веке отказался от железной дороги и… скажем так, сохранился в неизменном виде… По крайней мере центр.
- Там есть хорошая аутентичная русская кухня.
- Погода отличная для зимы — легкий мороз, снег.
- Можно доехать (от Москвы — за пару часов на машине), или на автобусе организаторов, или просто автобусе.
- И все это — бизнес-туризм — командировку отметят, к проведенным каникулам получите на работе пару отгулов.
- Общение — «тусовка» неглупых взрослых людей, с некоторыми возможностями и определенной властью — тут и руководство ВУЗов, руководство ALT Linux и РОСы — можно ловить и жаловаться, предлагать идеи… вполне можно сделать мир лучше, или хотя бы узнать, почему нет.
Впрочем, подавайте и доклады. Не в этот раз, так в следующий. И делайте их интересными.
Тогда хорошие доклады вытеснят посредственные, хорошие люди убьют всех плохих и мир станет лучше.
Еще раз напомним, как можно на наши новости подписаться:
- ↑ За очень-очень-очень редкими исключениями
- ↑ См. например, [18]; впрочем, лично я ориентируюсь на рассказы моего товарища, поработавшего с ними
- ↑ Так что если вдруг кто-то увидит у нас играющих в рабочее время — вы все неправильно поняли, мы тестируем.
- ↑ По юридическим соображениям, мы не можем включать проприетарные видеодрайвера в дистрибутив, поэтому наш мастер настройки XFdrake, выкачивает их с сайтов после установки системы. Ну и отдельный вопрос — это хитрости запуска видеокарт серии Optimus, про которых нужно тоже писать отдельную статью
- ↑ Дети — отличное оправдание играм во взрослом возрасте, их нужно завести хотя бы для этого.
- ↑ Все цели взяты вовремя.
- ↑ Операционную систему, конечно же
- ↑ Которыми кстати, тоже могут быть ROSA Desktopы, например других релизов
- ↑ Ну, почти это.
- ↑ Мы не обнаружили аналогичной возможности у других распространенных дистрибутивов
- ↑ Далее, в этой статье ради простоты, мы будем просто, без чинов, называть загрузчик GRUB2 — «грабом». Не «крабом», не «гробом», а именно «грабом».
- ↑ Именно он спас Микрософт, переделав адовую архитектуру Vistы в отличную «семерку».
- ↑ На самом деле реализовала год с лишним назад, показывали и пытались научить пользоваться докладчиков на OSDN-UA-2013, но все вот никак не давали
- ↑ Да, иконка наверно не очень удачная, ибо ScreenPen в первую очередь нужен не для увеличения, а для рисования, но в некотором смысле это тоже совместимость с ZoomIt. Если предложите интересную идею для иконки (не просто «карандаш»), или нарисуете ее, будем рады!
- ↑ Он java-программа, ставится скачиванием, работает везде… но если реально хотите — пишите, мы опакетим.
- ↑ Как это сделать правильно, см. [19]
- ↑ В основном относится к техническим и научным дисциплинам, возможно в философии и прочей гуманитарщине важно именно месмерическое воздействие лектора…
- ↑ См. также доклад «Средства восстановления системы в ROSA Linux»
- ↑ Одни только кучи независимых обновлялок для разных приложений чего-то только стоят, или какие-нибудь твикеры-улучшатели десктопного поведения, драйвера устройств ввода и графических карт… чего там только нет, весь сонм виндовс-утилит, драйверов и прочих софтин лез в tray…
- ↑ Разумеется, если их и там будут сотни, они начнут скейлится и сжиматься, но изначально им выдан здоровый кусок нижнего края экрана целиком, плюс под Linux не нужны автообновлялки к каждому приложению, в общем, хороший шанс уложится без утрамбовки.
- ↑ См. например, работы Джефа Раскина.
- ↑ На самом деле мы уже опробовали на нашем VK, но в других соцсетях нормальных опросов вообще не сделать, и не все пользуюся соцсетями, и вовсе несколько опросов в одном месте — удобней
- ↑ Если взять свежий GNOME, то на него не натягиваются 99% тем с gnome-look.org, отлаживают там только стандартную Adwaita.
- ↑ На самом деле могли, ведь у нас есть регулярно собираемые образы, прошедшие автоматическое тестирование (работоспособность инсталлятора, запускаемость всех программ, проверки сервисов, стресс-тесты… об этом мы расскажем отдельно)
- ↑ См. например, университетское исследование с ментоскопами и пульсометрами — «Оценка эффективности мультипрограммной работы в современных Linux GUI»
- ↑ К тому же неутомимые гномеры вовсе решили в свежих версиях гнома отказаться от нижнего трея.
- ↑ Мы проводили опросы, оно нравится нашим пользователям.
- ↑ Телефон я недавно сменил, со очень старого б/у на просто старый б/у, Galaxy S2, если что, и Яндекс.Навигатор еще не поставил
- ↑ Что напомнило мне «Обе эти кривые - полета и лунной поверхности - почти сходились. Пересекаются ли они? Нет. Но его дуга была почти касательной. Не известно, проскользнет он над самой поверхностью Луны или врежется в нее. Траектометр работал с точностью до семи-восьми километров, и Пиркс не мог знать, проходит ли кривая в трех километрах над скалами или под ними.»©
- ↑ А ведь мы всех туда приглашали…
- ↑ Наверно, это был хитрый план организаторов — разбавить мужское общество сисадминов женским общество SMMщиков…
- ↑ К сожалению, сейчас их редко кто пишет, и возможно никто не читает — вот тут я спрашивал, интересен ли обзор с прошлой конфы — никому, увы, нет